Ihre Kommentare
Hi, OnValue changed is an event triggered function which is managed by the subscriptions and it depends how the OPCUA server is calling it. Update itself is called in a regular manner. I think you might get values in the subscriptions because these might tell you all changes which the update function might miss because it is called in a cyclic manner.
this is a very old version with a different DLL for opcua. You should upgrade to the latest release.
Can you send us the project via realvirtual.io/send (please delete the library folder before) and we will debug it, to detect why the vector is not displaying on your side.
Hi,
I have checked your scene. Please update to our latest version 2021.17 and the problem should be fixed. Let me know if there are any other problems.
Regards
Christin
Hi, we never tested it but it should be possible because roboDK interface is working based on TCP-IP. But our experience with Hololens is not the best - we tried to do something similar but we did not succeeded in generating a good user experience and 3D performance of the hololens is very limited.
Which version of OPCUA are you using? We changed the basic dlls because there have been issues with encryption and so on. I think this is the reason. You should upgrade from the Unity Asset Store to latest version
I think it is because I have send you an OPCUA update (based on latest realvirtual) but it is including new things which are not compatible with your old game4automation.
I think best approach is, take all the scripts (not more) which you have in the current buggy project in the folder OPCUA and use them in your old project - so basically just take the scripts from the upgrade package I have send you.
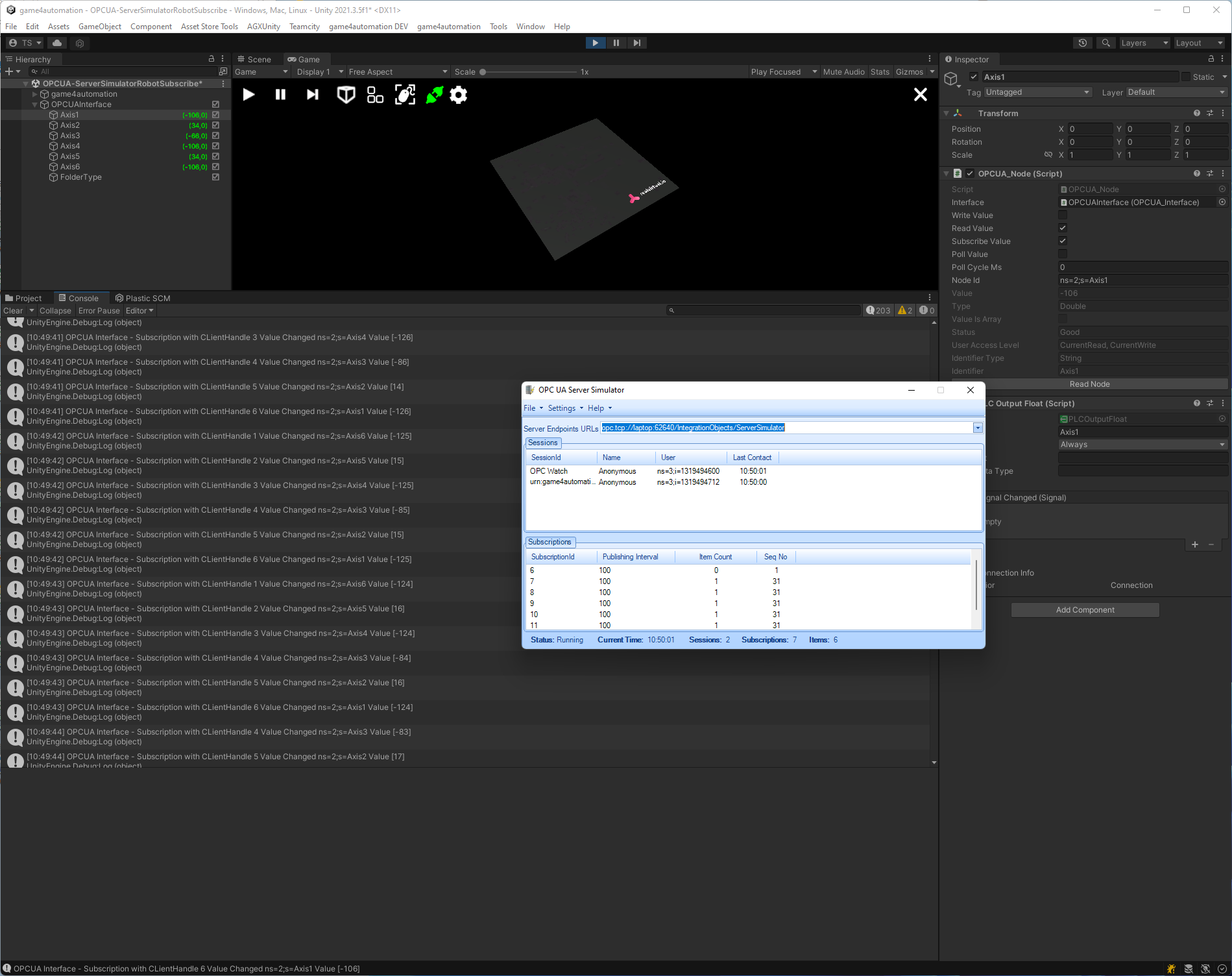
I checked in a test scene and subscribed to the variables - i can't see any problem:
Customer support service by UserEcho

Hi, anybody of you able to debug with us?