Ihre Kommentare
Hi, thanks for the feedback. So it seems that it was indeed a Unity bug.
Are you somehow able to share your model and the opcua server. It is hard to say what is going wrong without having the same setup?
I see errors in the console log. You should first try to get rid of these errors.
There seems to be a connection problem to your opcua server. Please start first with only one node (delete all the others) of a standard data type (float, bool, int). I have seen sometimes problems when unknown datatypes habe been used.
You just need to drag and drop a material with the wished color on the mesh of the frame.
What do you mean with Conveyor Teil. Something that is transported (MU) or the conveyor itself?
Sorry I missed it.There also needs to be GAME4AUTOMATION in the compiler defines.
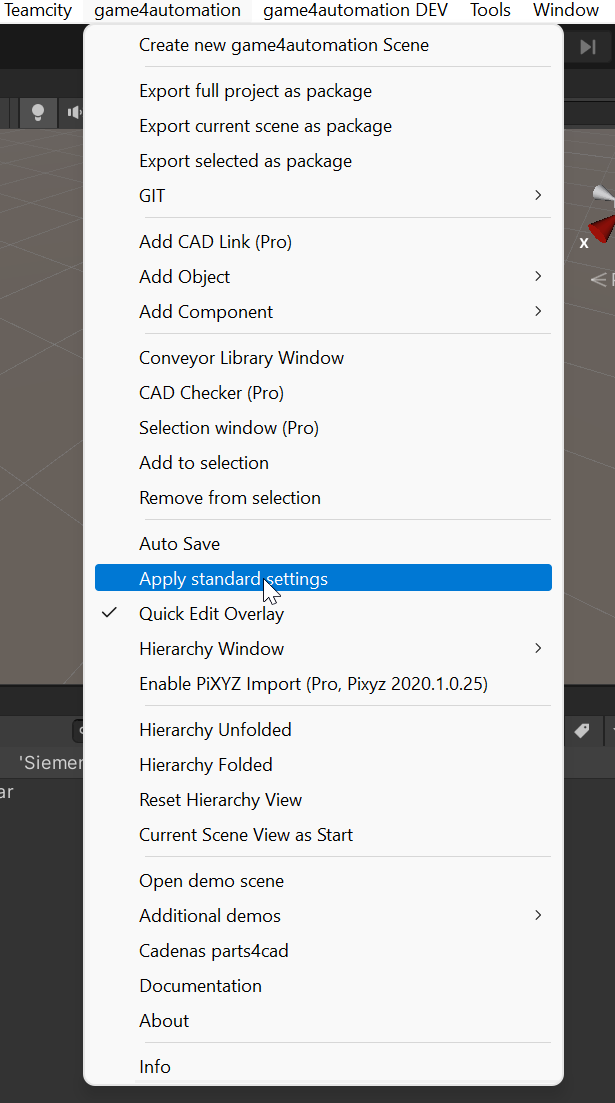
Apply standard settings should do the job.
Normally this is called upon first installation. What kind of products do you have got. Did you had any compiler errors when first installing Game4Automation Asset.
If there are compiler errors directly after installagion e.g. by some naming collissions with other things, that are also in the project, it might happen that the standard settings are not set as wished.
Something is wrong - if you are using Game4automation Professional the OPCUA node sould also automatically be added together with e.g. the PLCOutputFloat Script. Please check if in your installation this compile swith is set
GAME4AUTOMATION_PROFESSIONAL
(see also https://game4automation.com/documentation/current/compilerdefines.html)
Create Signals should be turned on on the OPCUA interface -this will create also the PLCOutputs while importing the signals:

Or you just add manually the OPCUA_Node together with a PLCOutputFloat for example.
Customer support service by UserEcho

Hi,
because your additional assets in the project are using Unity Postprocessing you need to put this into the Game4Automation.base Assembly definitions:
There is also some information about this here in the documentation:
https://game4automation.com/documentation/current/game4automation.html