Teilen Sie Ihre Erfahrunge und Wünsche mit uns und anderen Usern!
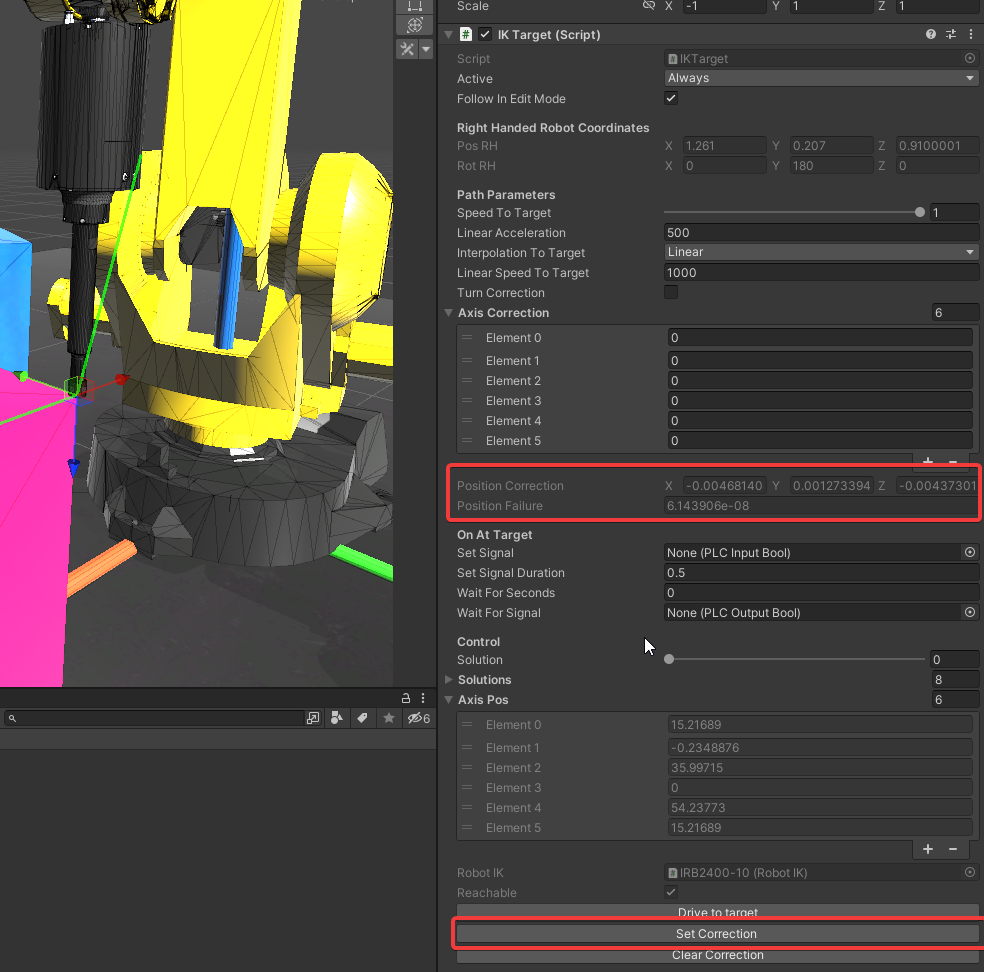
 Why the jump at each target in a path ?
Why the jump at each target in a path ?
Using professional version.
I followed the tutorial in this video, "Tutorial - realvirtual.io - Inverse robot kinematic with Unity", because I could see the robot jump back at each new target in a path.
Having finished the tutorial myself in Unity, I can see that the jump is real especially when the speed override is very slow.
Why does it jump and how can this be prevented. ? it is causing us a lot of grief.
Even in Edit mode when adding a new target to a path, the robot jumps back from the target at the start.
I would expect the target and TCP to both be in the same place and that would solve the problem, I find it very dissapointing that such a discrepancy exists in what is made out to be a professional product.
Thank you.
.

drive CurrentPosition() in IK mode issue
Using professional version.
When driving a robot arm around in Axis mode using a joystick, dirve CurrentPosition reports the correct angles.
However when in IK mode, the returned values change sign at the 180 position.
How can I get proper angle values in IK mode ?
Hi, the solver will not get any values greater or lower than -180 or +180 because with this solutions all possible positions can be described.
Ethernet IP AB Control logix "path". Im used to CIP paths, but its format doesnt seem to work.
I am wanting to connect to a AB Control Logix. I have IP, PLC type and a CSV file creating one test variable (float). When I test communication. It has a error. [EthernetIP - Error in connecting to PLC, please check your connection settings!] The only variable is the PATH. PATH has no explanation in documentation. I am used to CIP path, but that format doesnt seem to work. In my test rack I have a L83 processor, with built in ethernet, in slot 0. IP I can ping and connect with software. Just trying to set up a use case demo. I have a stand alone ethernet card I could use but dont think thats the issue.
I've tried 1,0 0,0 1,1 same error.
 Suggestion regarding DriveToTarget()
Suggestion regarding DriveToTarget()
I found it useful to change DriveToTarget to this;
public bool DriveToTarget(IKTarget target)
it returns true if the target was reachable otherwise false
Hi, thanks for the suggestion - we will implement that for the next release (in the next 2 weeks).
SetDriveTransformToValue issue
I have Rotation Drives on the pivots of a robot arm.
To set a 'pose' position I am using "SetDriveTransformToValue" with an angle parameter for each drive.
That part works, however when I then use "drive.CurrentPosition" it gives me the wrong answer and also the limits become in the wrong place.
I tried using "drive.Offset" and "drive.DriveReset" but these did nothing.
The drive transform in Unity Editor does show the correct angle, it's the CurrentPosition that seems to be the problem or it may be I am not using it correctly.
Hi, for setting a Drives position from external code you should just use Drive.CurrentPosition = NewPosition.
This will directly set the new position. You should use it in FixedUpdate and if you want to have a smooth movement you need to take care on your own about the interpolation.
The methods you used are misleading (and even not used from our side) - we will delete the in one of the next releases.
Real Time IK Mode
Hello,
Robot arm.
I need to move the robot TCP object using a joystick and have the robot follow, as it does in 'add target edit mode'.
This has to work not in edit mode but in Unity run mode. I have no problem moving the TCP object, the problem is having the robot follow it in real time.
Can you please advise how this can be done ?
Unity Input System Problem
Hello, I am new to realvirtual but have followed some tutorial videos with success using the professional version.
I have a problem though with inputs, it appears the Unity input system under Project Settings is being used by the game4automation system.
I tried to use an XBOX controller for moving a robot arm in Axis mode but the joystick inputs are not working as they do with just the native Unity input system.
What do I need to do to get this working please.
Hi, I am sorry. I don't have an answer to that out of the box. Yes we are using old (standard) input system. Maybe this collides with the XBOX Controller system. I don't know which kind of input system the XBOX Controller is using. Maybe you need to do changes within the game4automation folder in the scene, changing settings of the input module or changing things in the code of scene mouse navigation.
Event to subscribe to when import of Signals is finished?
Hey hey,
i cant seem to find the proper way of knowing when the import of Signals through the PLCSimAdvanced Interface is finished and i can start working with the signals(ex. searching for Signals or reading/writing to them).
My background is, that i want to implement my own logic of connecting and working with the signals, the SignalManager doesnt has enough flexibility for me.
But i cant seem to find an Event Like thing to know when the import has been finished.
Yes i could implement it myself inside the interface, but after every Update it would be broken.
So is there a correct and intendent way of doing this?
Greetings
 Transport Oberfläche passt nicht zur Geschwindigkeit
Transport Oberfläche passt nicht zur Geschwindigkeit
Hallo,
wenn ich eine Beschleunigung über eine SPS vorgebe, wenn ich die Drive_Speed benutze, verhält sich die Oberfläche sehr merkwürdig von einem Transport und passt nicht zur eigentlichen Bewegung. Wenn ich "Acceleration" deaktiviere sieht alles wieder gut aus. Ist dies noch ein Bug?
Was ist außerdem "Slow Acceleration"?
Hallo,
ich habe Ihnen eine Email mit einem aktualisierten Skript zukommen lassen. Ab dem nächsten Release ist die korrigierte Animation verfügbar.
Gruß Christin
Importierte Variablen von Signal Manager gehen verloren
Hallo,
ich benutze den Signal Manager um meine Variablen automatisch zu verbinden.
Das klappt soweit auch, aber sobald ich dieses auch für Sensoren versuche, scheitere ich.
Mein Script ist soweit nichts ungewöhnliches:
signalname = $"G4A_INX_{parentName}_{component.name}"; // define Signal name based on custom rule
var signal = GetOrCreateSignal<PLCInputBool>(signalname); // create the signal if not already there
((Sensor_Standard) component).Occupied = signal; // connect the signal to the behavior model
EditorUtility.SetDirty(((Sensor_Standard) component).Occupied);
connected = true;
Wenn ich mir den Sensor jetzt ansehe, sind alles Variablen verbunden.
Aber wenn ich nun starte werden die Variablen nicht geschrieben. Wenn ich jetzt nochmal die Sensoren angucke sehe ich auch keine verbundene Variable mehr. Wenn ich aber bei meiner Variable gucke, steht dort immer noch das diese mit dem Sensor verbunden ist.
Bei dem Drive_Speed funktioniert alles. Ich kann alles lesen und schreiben. Aber bei einem einfachem Sensor hakt es irgendwo...
Mache ich etwas falsch? Braucht Ihr mehr Informationen?
Customer support service by UserEcho