Teilen Sie Ihre Erfahrunge und Wünsche mit uns und anderen Usern!

 IK Path could not complete the execution
IK Path could not complete the execution
Hi,
Now I have created two paths A and B using IK Path, when I repeat the signal quantity given to start for each path individually the paths can be executed correctly, but once I execute A and B alternately the paths are unreachable.
For example, I am using Signal Start to get path A to start moving, and Signal Ended to get if path A has finished executing. When Signal Ended is true for A, I start executing path B. It happens that path B can't finish execution and Signal Ended stays false.
This results in me not being able to control the robotic arm by itself to do the job I want to do, how can I solve this problem?
OPC UA reconnects only once, Realvirtual professional
Good morning,
We are having problems with the OPC UA connection.
When the OPC server is turned off and on again the connection is reestablished correctly, but only once since startup, if the server disconnects a second time the connection is never reestablished.
How can we solve the problem?
Thank you.
Can't import nodes of Beckhoff OPC UA Server in Unity Editor
Hello,
I recently purchased realvirtual for Unity and I am trying to get familiar with the demo application.
For future projects it is necessary to keep up OPC UA connections with Beckhoff TwinCat PLCs and Siemens PLCs.
For now I work with a Beckhoff PLCs that runs demo code and a OPC UA server on it.
Connecting to the OPC UA Server with OpcWatch or UaExpert is no issue (security = None)
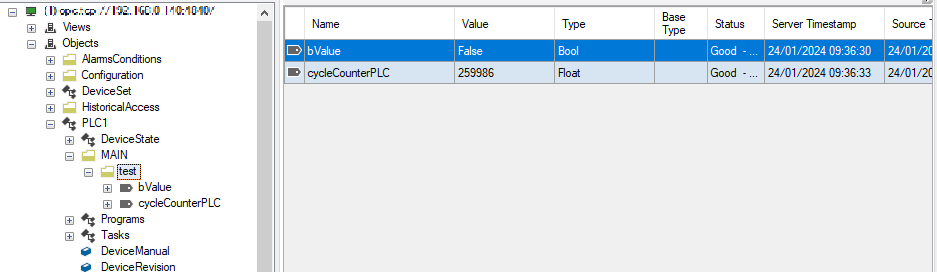
My Unity configuration looks like this:
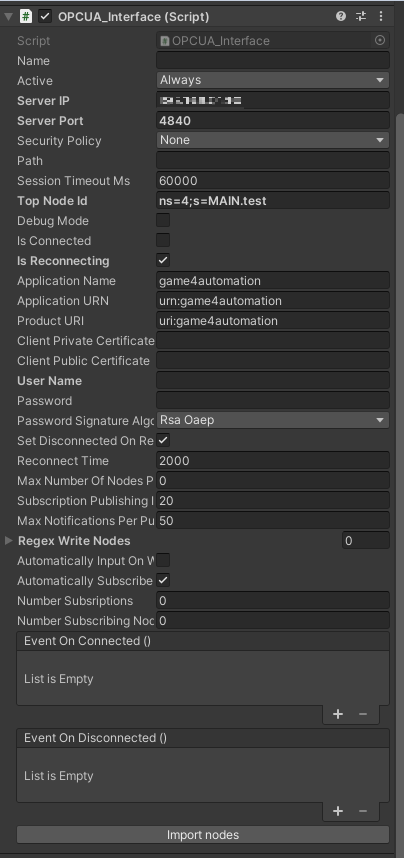
However trying to connect in the Unity Editor results in the following error message.
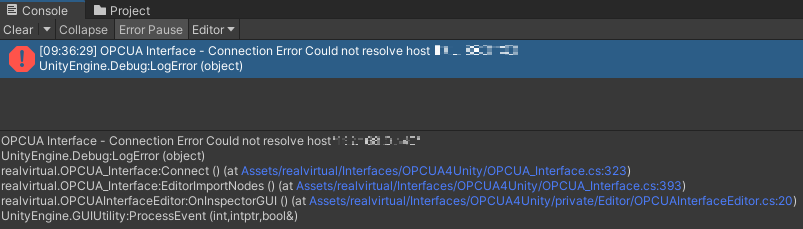
I tried applying standard setting and also connecting to a local python opc ua server without success.
Connecting to the PLC with the TwinCATInterface object however worked well (for future applications a wireless connection on android devices are mandatory).
Unity Version: 2022.3.14f1
realvirtual version: release 2022.07 07. September 2023
I hope I delivered sufficient information.
Thanks in advance.
BatuOx4S
 Suspend the use of paths built by IK
Suspend the use of paths built by IK
Hi,
I created the path after building the robot using the IK component.
When I select the loop, it works the way I want it to.
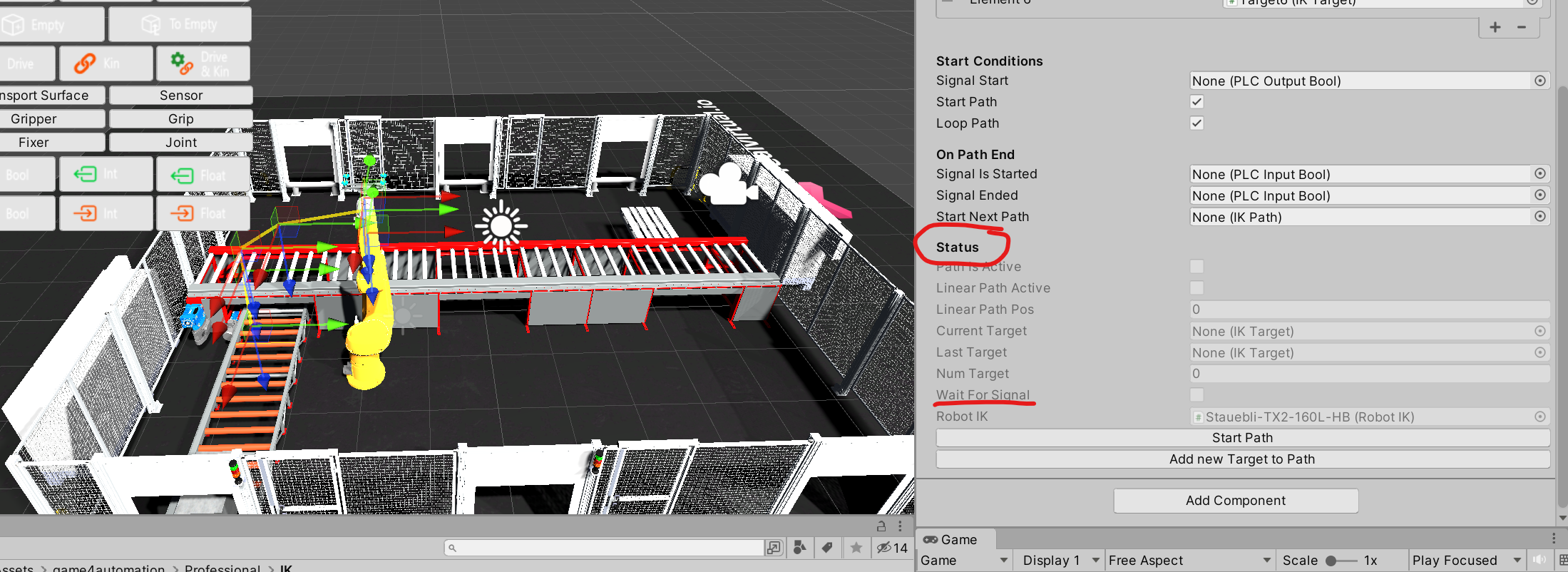
But now my requirement is that I want it to be able to pause the movement after receiving a certain pause signal value and continue the movement after receiving a move signal value.
May I know how can I implement that functionality.
I see that there is a WaitForSignal property in the Script but it is read only, can I use this property? How can I use this property?
PATH IK and target problem
I followed the inverse kinematics tutorial. I am using the ABB IRB 1300 robot. The issue I am having is that my robot's TCP is not aligned to the root. It is causing issues and when using the Path IK, the target is not showing (red dot) and the robot's not moving at all. My friend is also having a problem with the Path IK, the target was stated to be unreachable.
area read Mode with DB
Hello,
is there anyone who can explain, how I can get the data, when I use Area Read Write Mode in the S7 Interface? I tried to read form a DB, which worked well. So the connection to my CPD is OK.
Thanks
Building to Android compiler error: Missing reference to SharedMemoryInterface in SharedMemoryInterfaceEditor
When switching build mode to Android, the SharedMemoryInterfaceEditor is still compiled but SharedMemoryInterface is not.
First line in SharedMemoryInterface:
#if UNITY_STANDALONE_WIN
First line in SharedMemoryInterfaceEditor:
#if (UNITY_EDITOR && !UNITY_EDITOR_OSX && !UNITY_EDITOR_LINUX)
Clearly, in android, the SharedMemoryInterface is not declared but SharedMemoryInterfaceEditor is, leading to compiler error.
Work around: Change first line in SharedMemoryInterfaceEditor to:
#if (UNITY_EDITOR && UNITY_STANDALONE_WIN && !UNITY_EDITOR_OSX && !UNITY_EDITOR_LINUX)

Thanks a lot - which version are you using. In the current release we are able to build to Android? The compiler define of your work around is a solution - in current release it should be solved by the assembly definition.

Fixer not fixing properly?
Hi,
I am quite stumped by the Fixer's behaviour. This should be simple functionality and it does not seem to work for me. It appears linked to how the "MUs Fixed" array is updating (or not updating).
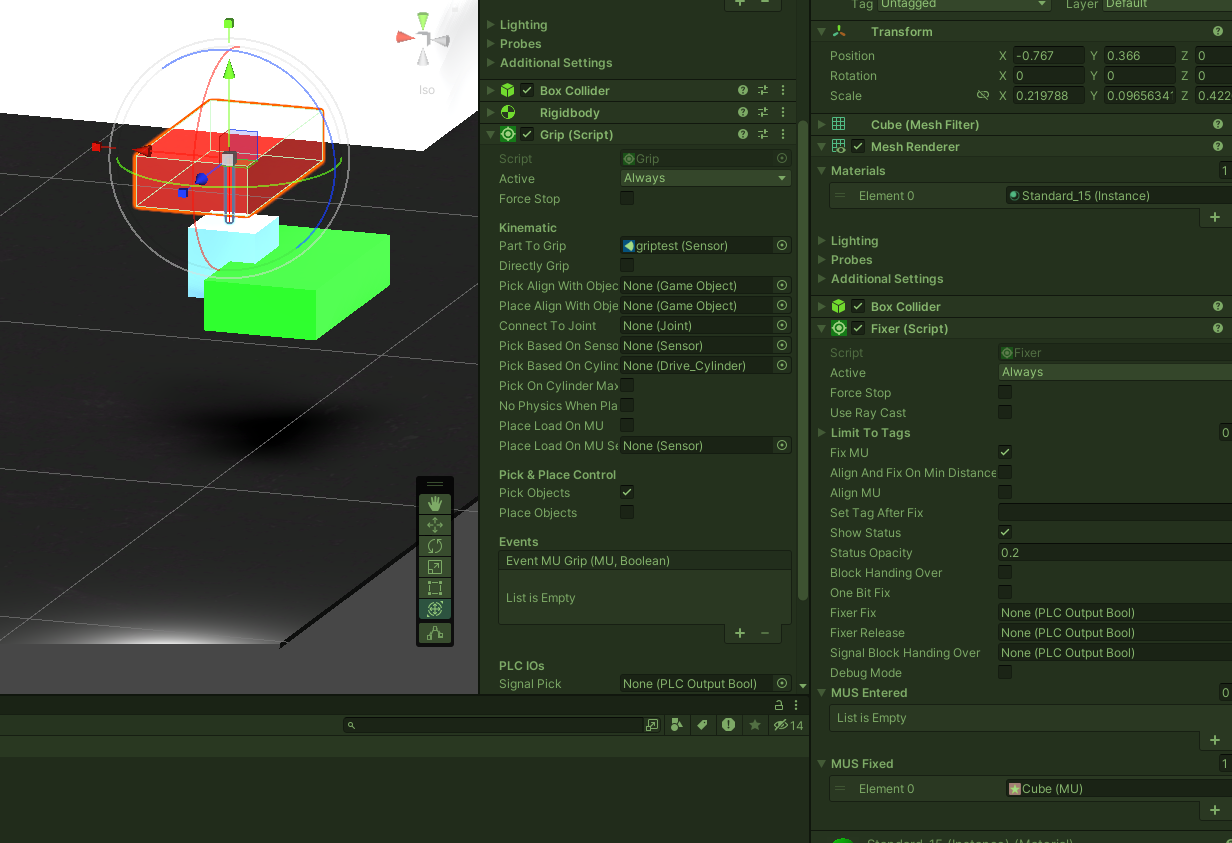
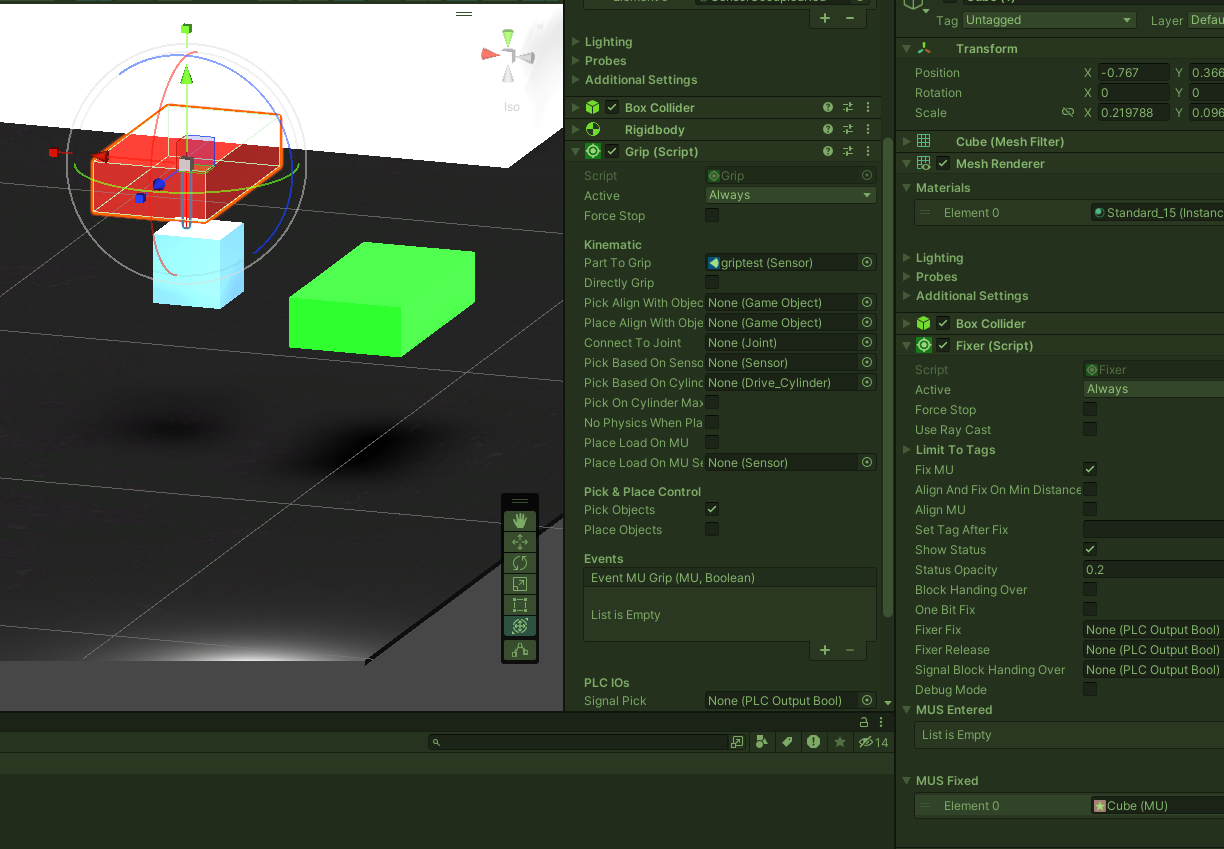
I have this gripper (grip & sensor) (yellow), MU (blue) and Fixer (red).
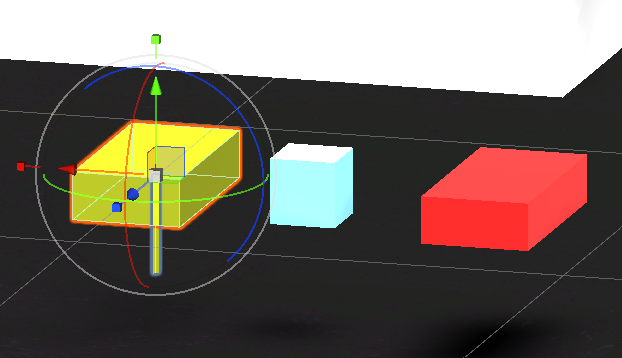
Picking works fine.
At this point, the MUS Fixed array is empty and the MU has been picked.
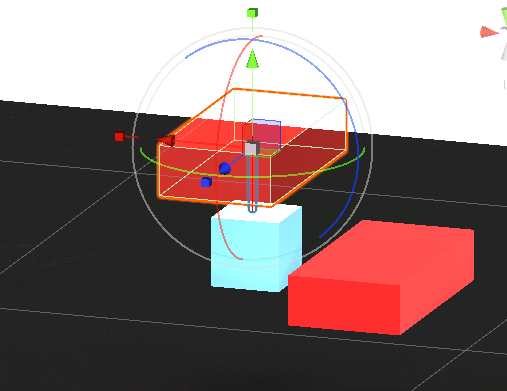
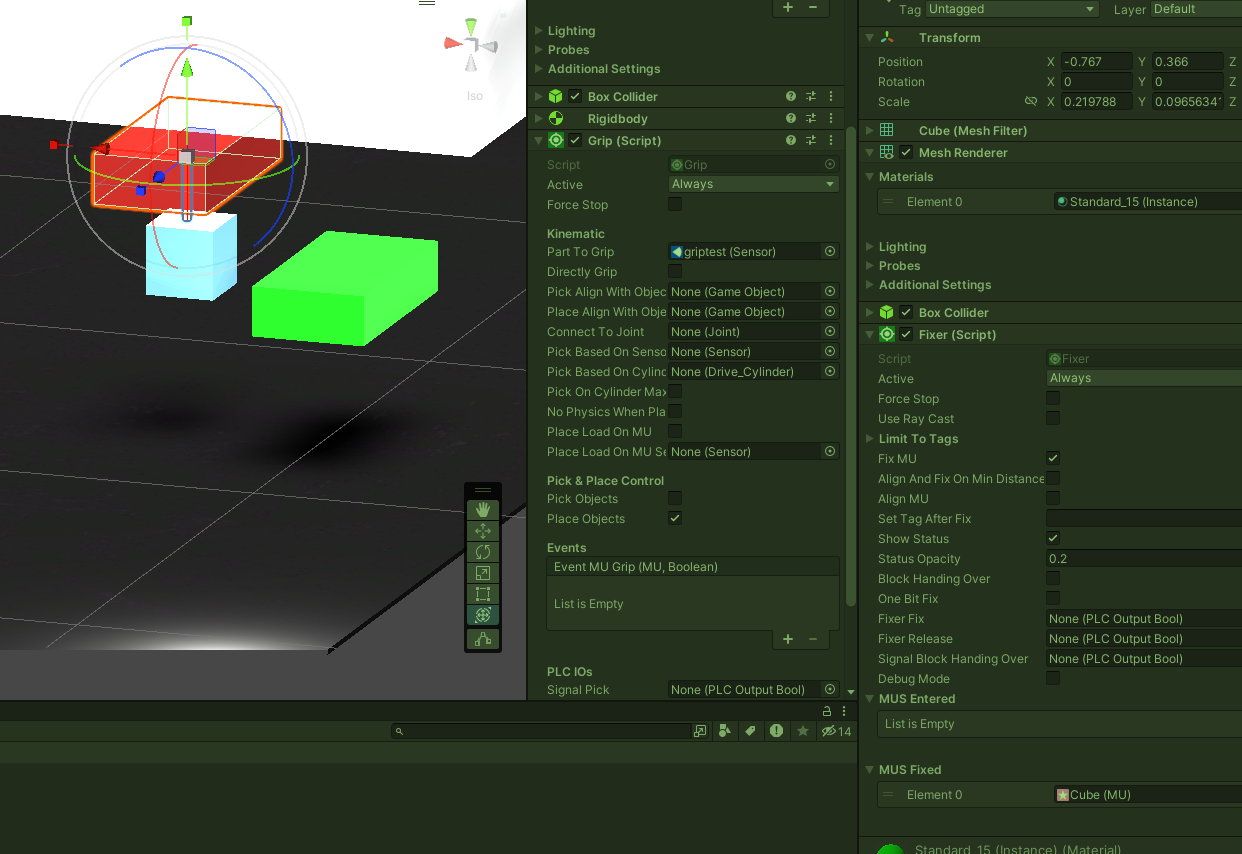
As soon as the MU is moved into the Fixer the MUS Fixed array updates but the MU is not actually fixed. And 'Place Objects' on the Grip has no effect.
At this point, 'Place Objects' was clicked while in the Fixer collider but was not Fixed.
But if I clear the MUS Fixed array then re-enter the Fixer with 'Placed Objects' on, the MU becomes Fixed.
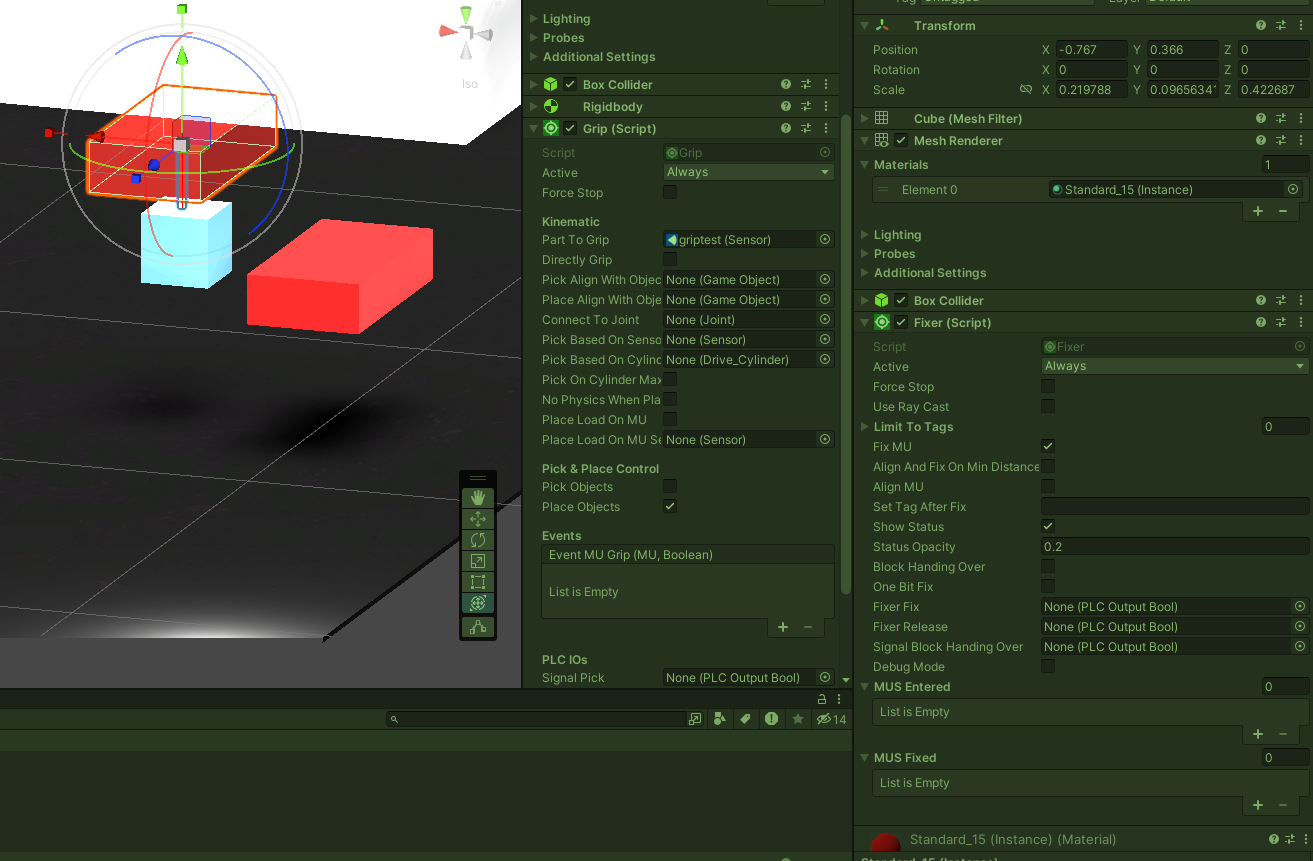
Picking works but the MUS Fixed array is not cleared.
Placing again will not work until the MUS Fixed array is cleared manually. MUS Entered array is never updated.
I notice that in the Gripping MUs sample this does seem to work and arrays are updated properly. But there's a number of signals in use in that demo. Perhaps it works only when PLC signals are used. But it would be nice if it worked without the PLC signals.
Hi,
I have setup the situation as you described.
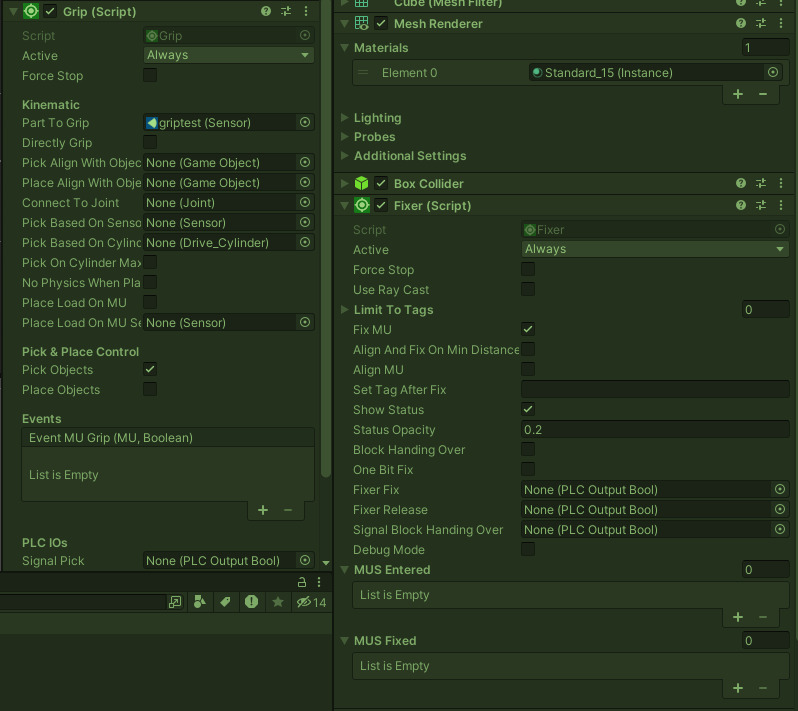
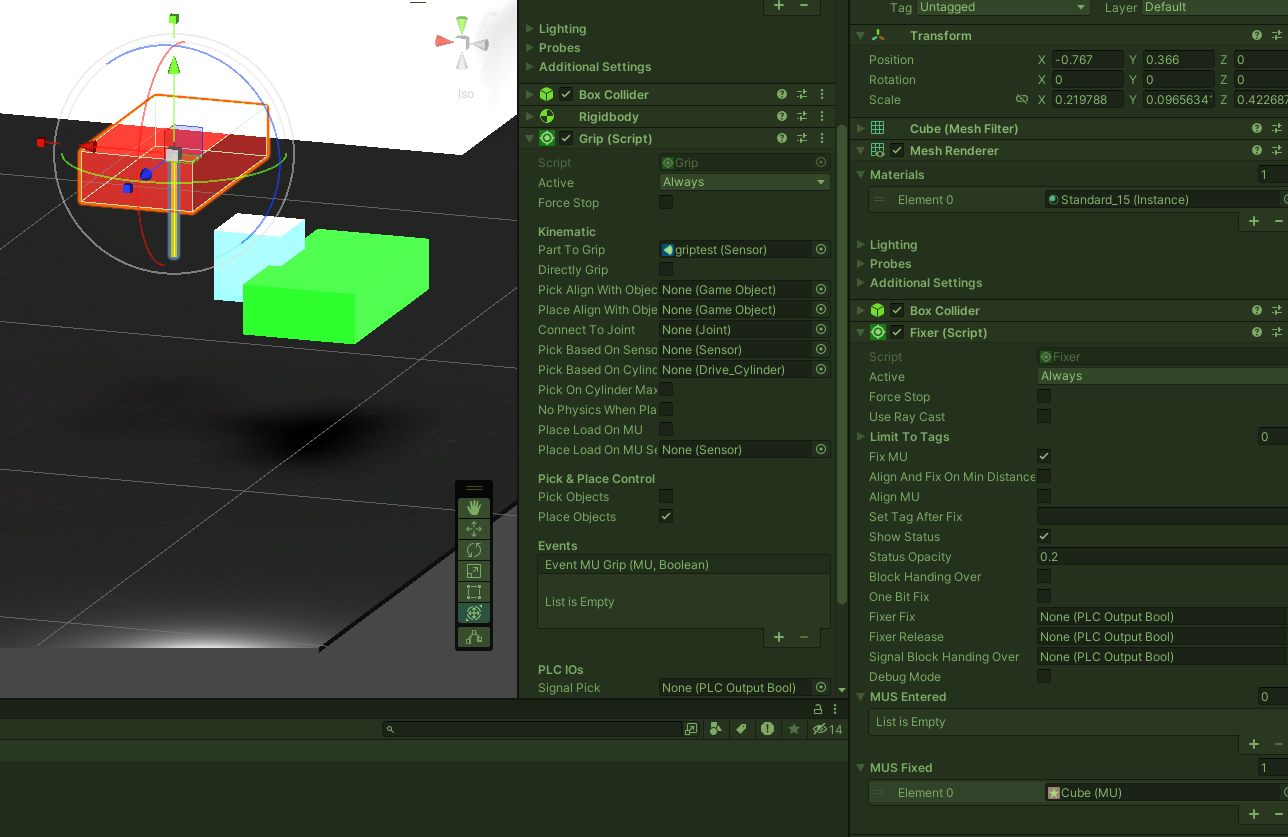
The settings in my Grip-script are the following:
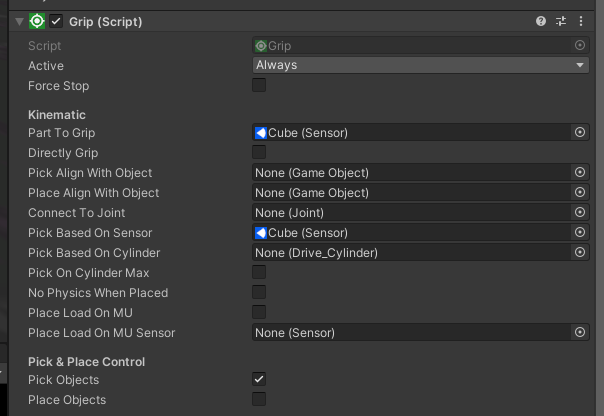
With this settings it works when you switch between pick and place during the game mode. The Fixer only keep the MU if the gripper is set to place. The gripper always holds the higher priority.
According to your screen shots I'm not quite sure how the picking was able to work because there is no pick mode defined.
(for this have a closer look in out documentation: Grip - realvirtual.io User Documentation (gitbook.com).
Kind regards
Christin

Customer support service by UserEcho
{kind=link}
{kind=link}
{kind=link}
{kind=link}