Teilen Sie Ihre Erfahrunge und Wünsche mit uns und anderen Usern!
 Import nodes remains importing for ever
Import nodes remains importing for ever
Hello all,
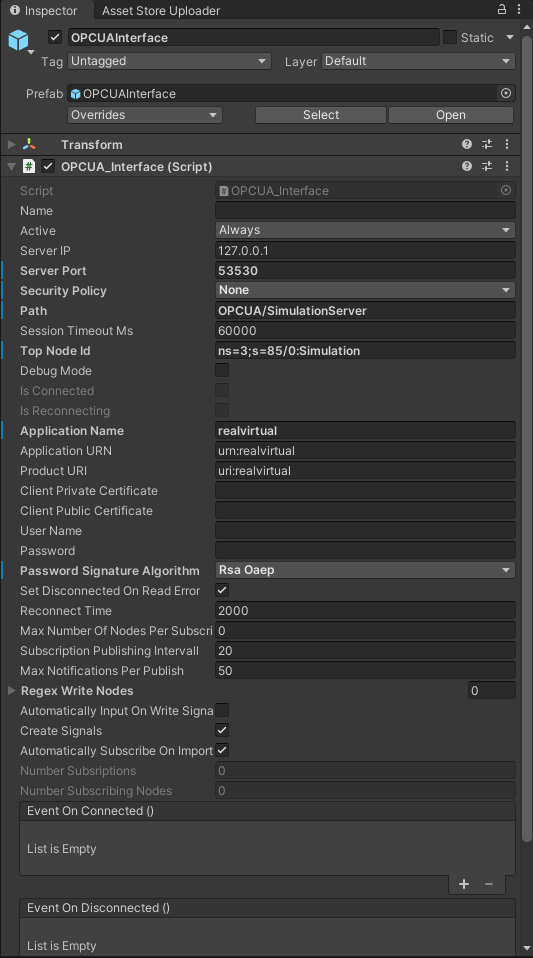
My application gets stuck when trying to import nodes in Unity3D from the Prosys OPC UA Simulation Server. It shows a window saying "Hold on... Importing assets", but it never ends. Here is a capture from Wireshark showing the messages exchanged. Any ideas?

Hi, we have found a solution for Prosys. It was a problem with the underlying OPCUA library. With this setting we are now able to import (you need to select a topnode). It will be included in the next release (2022.11). Please get in contact with us if you need a beta earlier.
Inspector-items turning grey
Hi,
new here. I looked at the scene "DemoGame4Automation". I want to replicate that in my own project, but have the problem that as soon as I add the "RobotIK"-script and a path and target, all axes under the robot are greyed out. I am also unable to change values in the inspector then. Any solutions to this?
Regards,
Jan
Hello,
I have checked your upload.
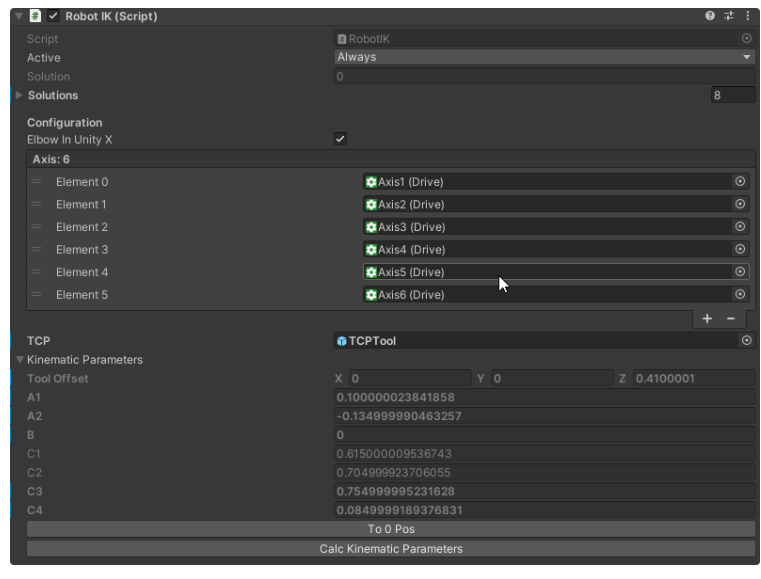
The definition of the axis within the RobotIK component is missing. (see screenshot below).
Please define it and use the option above to update the drives.
There was also an error message in the console pointing in this direction.

 Build Error UnityLinker.ex
Build Error UnityLinker.ex
When creating a test environment in Unity, I encountered an unsolvable error.
After
creating a basic scene using the basic documentation, it can be
displayed and controlled flawlessly in Unity play mode. Creating a build
of the project for UWP results in the following error code (see below).
Tried solutions for basic scene without add-ons except Game4Automation
- Using default settings (Game4Automaltion dropdown menu)
- Removing unsupported elements for UWP (https://doc.realvirtual.io/advanced-topics/supported-platforms ), if available
- Reinstalling and changing the build path of Unity
- Removal of features see https://forum.realvirtual.io/knowledge-bases/2/articles/290-build-error-in-version-202005
Experimental solutions
- Integration of MRTK-ToolKite 3 and configuration of Unity environment for HoloLens2/UWP
- Build of a project without Game4Automation only with MRTK3 (works)
- Removal of unused functions of the Game4Automation software.
Objective
for me is to build a S7 TCP/IP Connection with a HoloLens. This works
completely in play mode, even in connection with the MRTK 3 toolkit and
its functions. For this, the main controller script was modified to have
only the interface function. Again, the same error results.
I
have made the project available online once with a simple basic scene
and with the basic extension for the HoloLens needed for me.
About a feedback\Tips I would be happy.
Failed running C:\Program Files\Unity 2021.3.18f1\Editor\Data\il2cpp/build/deploy/UnityLinker.ex
Build completed with a result of 'Failed' in 20 seconds (19680 ms)
UnityEngine.GUIUtility:ProcessEvent (int,intptr,bool&)
UnityEditor.BuildPlayerWindow+BuildMethodException: 2 errors
at UnityEditor.BuildPlayerWindow+DefaultBuildMethods.BuildPlayer
(UnityEditor.BuildPlayerOptions options) [0x002da] in
<42a64fd733d9417da1ea3a757ad9a96d>:0
at
UnityEditor.BuildPlayerWindow.CallBuildMethods (System.Boolean
askForBuildLocation, UnityEditor.BuildOptions defaultBuildOptions)
[0x00080] in <42a64fd733d9417da1ea3a757ad9a96d>:0
UnityEngine.GUIUtility:ProcessEvent (int,intptr,bool&)
---------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
Bei der Erstellung einer Testumgebung in Unity ist ein für mich nicht lösbarer Fehler aufgetretten.
Nach dem erstellen einer Grundszene anhand der Grundlagen Dokumentation lässt sich diese einwandfrei im Unity-Playmodus darstellen und kontrollieren. Bei der Erstellung eines Buildes des Projektes für UWP ergibt folgender Fehlercode (siehe unten).
Versuchte Lösungen für Grundszene ohne Add-ons außer Game4Automation
- Verwendung von Standarteinstellungen (Game4Automaltion Dropdown Menü)
- Entfernen von nicht supporteten Elementen für UWP (https://doc.realvirtual.io/advanced-topics/supported-platforms), soweit vorhanden
- Verwendung letzter Stable Unity Version 2021.3.18f1
- Neuinstallation und Änderung des Buildpath von Unity
- Entfernung der Funktionen siehe https://forum.realvirtual.io/knowledge-bases/2/articles/290-build-error-in-version-202005
Experimentelle Lösungen
- Eindung von MRTK-ToolKite 3 und Konfiguration der Unity Umgebung für HoloLens2/UWP
- Build eines Prokjektes ohne Game4Automation nur mit MRTK3 (funktioniert)
- Entfernung von nicht verwendenten Funktionen der Game4Automation Software
Zielstellung für mich ist es eine S7 TCP/IP Connection mit einer HoloLens herzustellen. Diese funktioniert vollständig im Playmodus, selbst in Verbindung mit dem MRTK 3 Toolkit und dessen Funktionen. Hierzu wurde das Main Controller Script abgeändert, dass nur noch die Interface Funktion vorhanden ist. Auch hier ergibt sich der gleiche Fehler.
Ich habe das Projekt online zur Verfügung gestellt einmal mit einer einfachen Grundszene und mit der für mich benötigten Grunderweiterung für die HoloLens.
Über einen Rückmeldung\Tipps würde ich mich freuen.
Failed running C:\Program Files\Unity 2021.3.18f1\Editor\Data\il2cpp/build/deploy/UnityLinker.ex
Build completed with a result of 'Failed' in 20 seconds (19680 ms)
UnityEngine.GUIUtility:ProcessEvent (int,intptr,bool&)
UnityEditor.BuildPlayerWindow+BuildMethodException: 2 errors
at UnityEditor.BuildPlayerWindow+DefaultBuildMethods.BuildPlayer (UnityEditor.BuildPlayerOptions options) [0x002da] in <42a64fd733d9417da1ea3a757ad9a96d>:0
at UnityEditor.BuildPlayerWindow.CallBuildMethods (System.Boolean askForBuildLocation, UnityEditor.BuildOptions defaultBuildOptions) [0x00080] in <42a64fd733d9417da1ea3a757ad9a96d>:0
UnityEngine.GUIUtility:ProcessEvent (int,intptr,bool&)
There first error is about I18N - please check if folder Tools/ZIP is in our project and delete that (and every code which is using ZIP - it is not essential needed)
Why the jump at each target in a path ?
Using professional version.
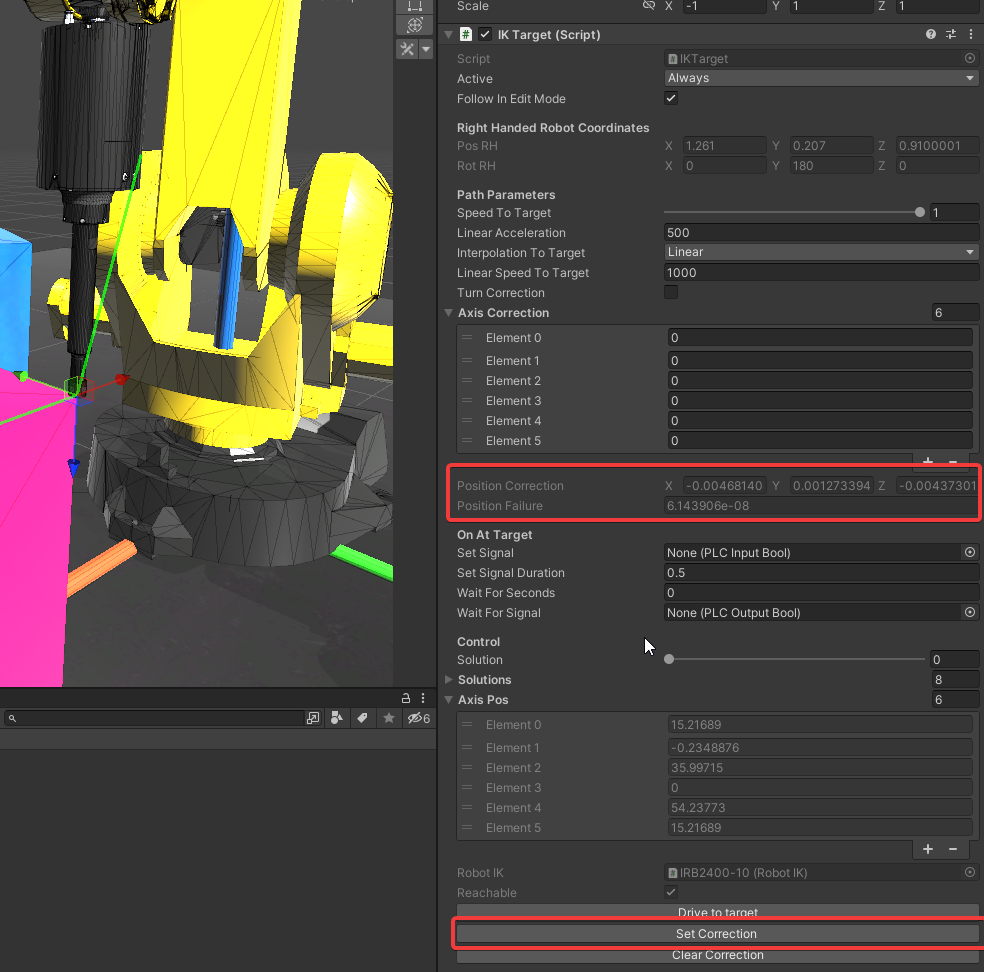
I followed the tutorial in this video, "Tutorial - realvirtual.io - Inverse robot kinematic with Unity", because I could see the robot jump back at each new target in a path.
Having finished the tutorial myself in Unity, I can see that the jump is real especially when the speed override is very slow.
Why does it jump and how can this be prevented. ? it is causing us a lot of grief.
Even in Edit mode when adding a new target to a path, the robot jumps back from the target at the start.
I would expect the target and TCP to both be in the same place and that would solve the problem, I find it very dissapointing that such a discrepancy exists in what is made out to be a professional product.
Thank you.
.
drive CurrentPosition() in IK mode issue
Using professional version.
When driving a robot arm around in Axis mode using a joystick, dirve CurrentPosition reports the correct angles.
However when in IK mode, the returned values change sign at the 180 position.
How can I get proper angle values in IK mode ?
Hi, the solver will not get any values greater or lower than -180 or +180 because with this solutions all possible positions can be described.
Ethernet IP AB Control logix "path". Im used to CIP paths, but its format doesnt seem to work.
I am wanting to connect to a AB Control Logix. I have IP, PLC type and a CSV file creating one test variable (float). When I test communication. It has a error. [EthernetIP - Error in connecting to PLC, please check your connection settings!] The only variable is the PATH. PATH has no explanation in documentation. I am used to CIP path, but that format doesnt seem to work. In my test rack I have a L83 processor, with built in ethernet, in slot 0. IP I can ping and connect with software. Just trying to set up a use case demo. I have a stand alone ethernet card I could use but dont think thats the issue.
I've tried 1,0 0,0 1,1 same error.
 Suggestion regarding DriveToTarget()
Suggestion regarding DriveToTarget()
I found it useful to change DriveToTarget to this;
public bool DriveToTarget(IKTarget target)
it returns true if the target was reachable otherwise false
Hi, thanks for the suggestion - we will implement that for the next release (in the next 2 weeks).
SetDriveTransformToValue issue
I have Rotation Drives on the pivots of a robot arm.
To set a 'pose' position I am using "SetDriveTransformToValue" with an angle parameter for each drive.
That part works, however when I then use "drive.CurrentPosition" it gives me the wrong answer and also the limits become in the wrong place.
I tried using "drive.Offset" and "drive.DriveReset" but these did nothing.
The drive transform in Unity Editor does show the correct angle, it's the CurrentPosition that seems to be the problem or it may be I am not using it correctly.
Hi, for setting a Drives position from external code you should just use Drive.CurrentPosition = NewPosition.
This will directly set the new position. You should use it in FixedUpdate and if you want to have a smooth movement you need to take care on your own about the interpolation.
The methods you used are misleading (and even not used from our side) - we will delete the in one of the next releases.
Real Time IK Mode
Hello,
Robot arm.
I need to move the robot TCP object using a joystick and have the robot follow, as it does in 'add target edit mode'.
This has to work not in edit mode but in Unity run mode. I have no problem moving the TCP object, the problem is having the robot follow it in real time.
Can you please advise how this can be done ?
Unity Input System Problem
Hello, I am new to realvirtual but have followed some tutorial videos with success using the professional version.
I have a problem though with inputs, it appears the Unity input system under Project Settings is being used by the game4automation system.
I tried to use an XBOX controller for moving a robot arm in Axis mode but the joystick inputs are not working as they do with just the native Unity input system.
What do I need to do to get this working please.
Hi, I am sorry. I don't have an answer to that out of the box. Yes we are using old (standard) input system. Maybe this collides with the XBOX Controller system. I don't know which kind of input system the XBOX Controller is using. Maybe you need to do changes within the game4automation folder in the scene, changing settings of the input module or changing things in the code of scene mouse navigation.
Customer support service by UserEcho