Teilen Sie Ihre Erfahrunge und Wünsche mit uns und anderen Usern!
Teilen Sie Ihre Erfahrunge und Wünsche mit uns und anderen Usern!

 RV6.0.6 Creating a Build doesn't work
RV6.0.6 Creating a Build doesn't work
Hi Team,
creating a build seems to not work with RV6.0.+ (I tried several versions).
For this I just imported the RV6 package and created a build but the game looks like this.
My Unity version is 6000.0.58f2.
PLC SIM Advanced 6.0 Windows 11 Realvirutal Unity 6
I have problem with PLCSIM Advanced (Pro). I tried import signal but everytime i have this message.

When I tried start manual PLCSimAdvancedCoupler I have this

I copty to correctly location because I use this in version 2022 but now I can't use this.
 RV6: Set Start Position of Main Camera
RV6: Set Start Position of Main Camera
Hi,
I am changing the starting view of the main camera but when activating the game mode the main camera switches back to another view.
Why is that and how to control the starting view of the main camera properly?

Need IK support for 6-axis collaborative robots (Cobot)
Hello Again,
I'm currently using realvirtual io 6 Professional.
Recently, many robots are being introduced to automate manufacturing processes,
but most of them are collaborative robots, not industrial robots.
- Industrial robots: TCP, Axis6, 5 and 4 on a straight line
(example ABB IRB 1200, Yaskawa robot)
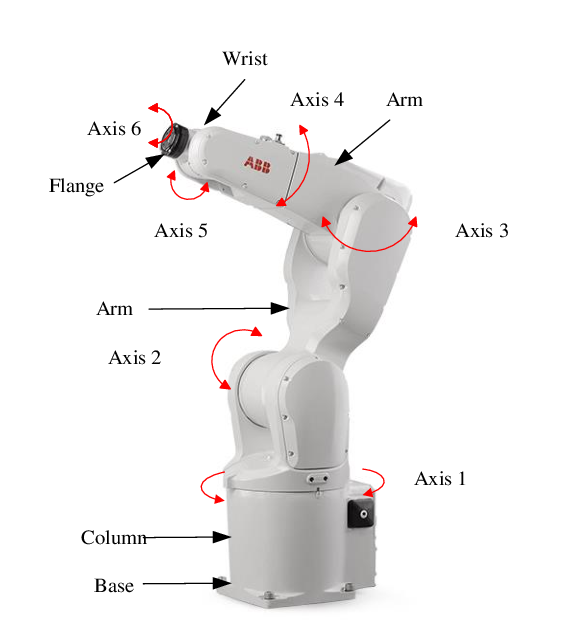
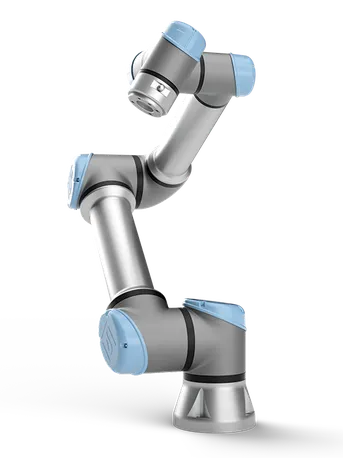
- Collaborative robots (Cobot) : TCP, Axsis6, 5 and 4 are not on a straight line
(example UR UR5/6/10, Fanuc CRX 10iA)
I'd like to explore this robotic automation with realvirtual io,
but the robot IK support in realvirtual io currently only supports industrial robots, limiting its usability.
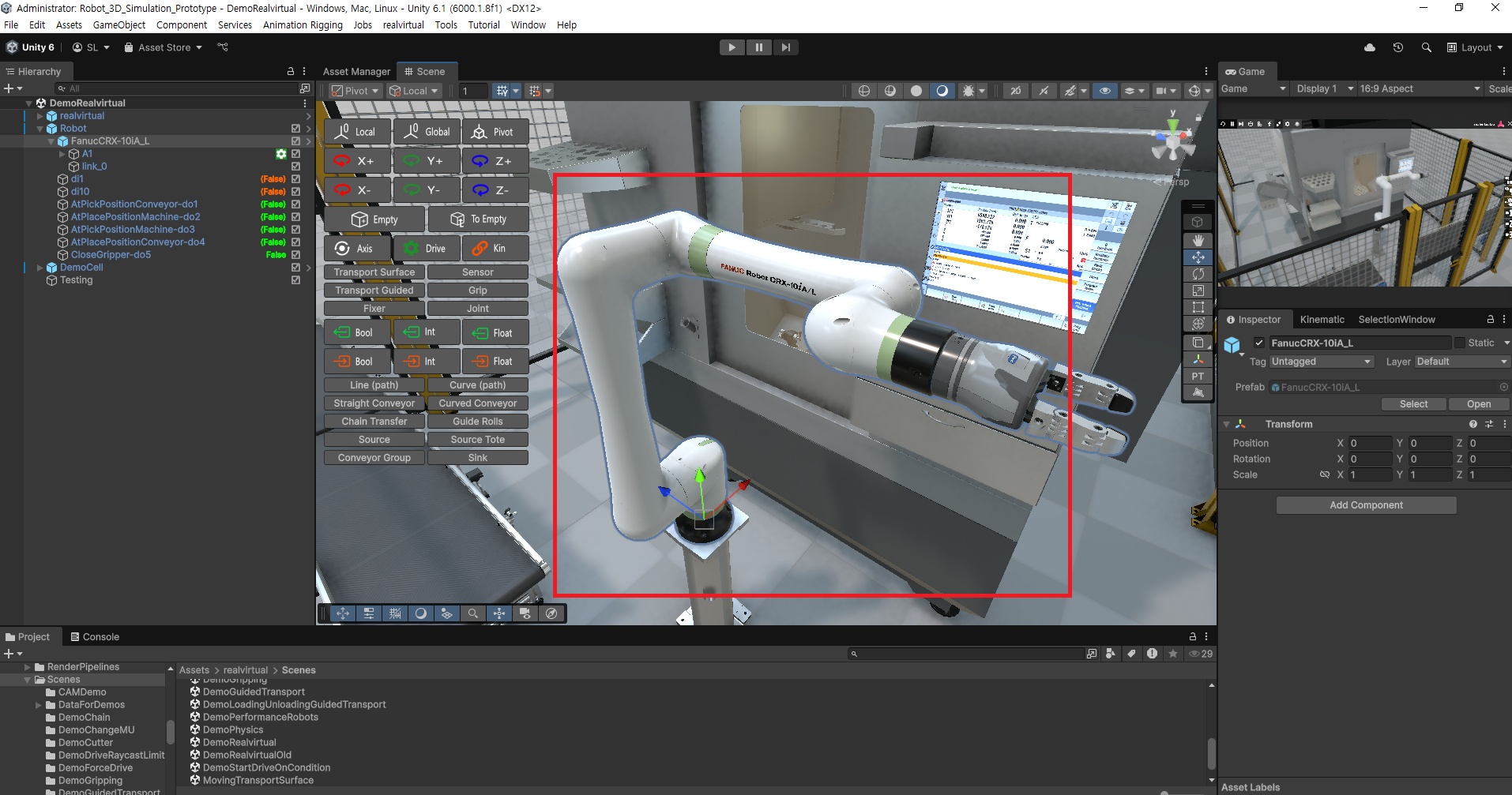
★ I need IK support for 6-axis collaborative robots (Cobot).
(As shown in the image below, the FANUC robot (CRX-10iA) used in the representative demo included in realvirtual io 6 is also a 6-axis collaborative robot (Cobot), but I can't find IK support for 6-axis collaborative robots in realvirtual io 6 Professionals)
Do you have any plans for this?
(Please provide IK support for Cobot..!)
Thanks.
Best regard,
Seokhyun Lee

 s7接口通讯问题
s7接口通讯问题

如你所见,我在用s7接口时出现了一点问题,我在S7-PLCSIM Advanced运行我的PLC时修改这一个值可以映射进unity,但是在unity中我尝试切换value却无法保持值,他就像切换了一下,但是马上被改回去了,我的值默认是false,点击切换后会短暂的显示true,但是还是会变回false,这是为什么,我在博途监控表里修改值是可以映射在unity中的,值也能正常切换,允许来自远程对象的 PUTIGET 通信访间也是勾选的,包括完全访问权限和仿真支持块编译也是勾选了,博途设置也没有问题,就是unity无法切换博途v20的值,我使用的版本是realvirtual.io6.2.1,博途版本是v20

MQTT Interface Error when connecting to HiveMQ Cloud
I'm having trouble getting Realvirtual MQTT to connect to HiveMQ Cloud. When I test with Python code, everything works perfectly; the connection is established, and I can publish data. However, Realvirtual MQTT reports an error specifically when using HiveMQ Cloud. I've tested both with and without the security option enabled. This issue doesn't occur when using a local MQTT Mosquitto broker.
MQTTInterface

Error


For everybody who needs it - we have a patch for Unity2022. In the next realvirtual 6 release there will be an update also supporting Servers with a large number of MQTT Topics and better failure handling for unsupported datatypes. Also BestMQTT Dependency will be removed.
BESTHTTP compile error
Hi,
I am using the realvirtual Pro version
I have a similar issue so I've added a comment to this topic:
https://forum.realvirtual.io/communities/1/topics/687-compile-errors-on-mqtt-interface

Simulation window paused when window not active
I have a question about the Unity environment. It pauses when I have another program active. How can I solve this issue?
Error when importing asses
Hello. I run unity 6000.1.15 and just downloaded and imported realvirtual professional from MyAssets.
I can see no realvirtual menu bar, no demo scene was opened and i receive these errors:
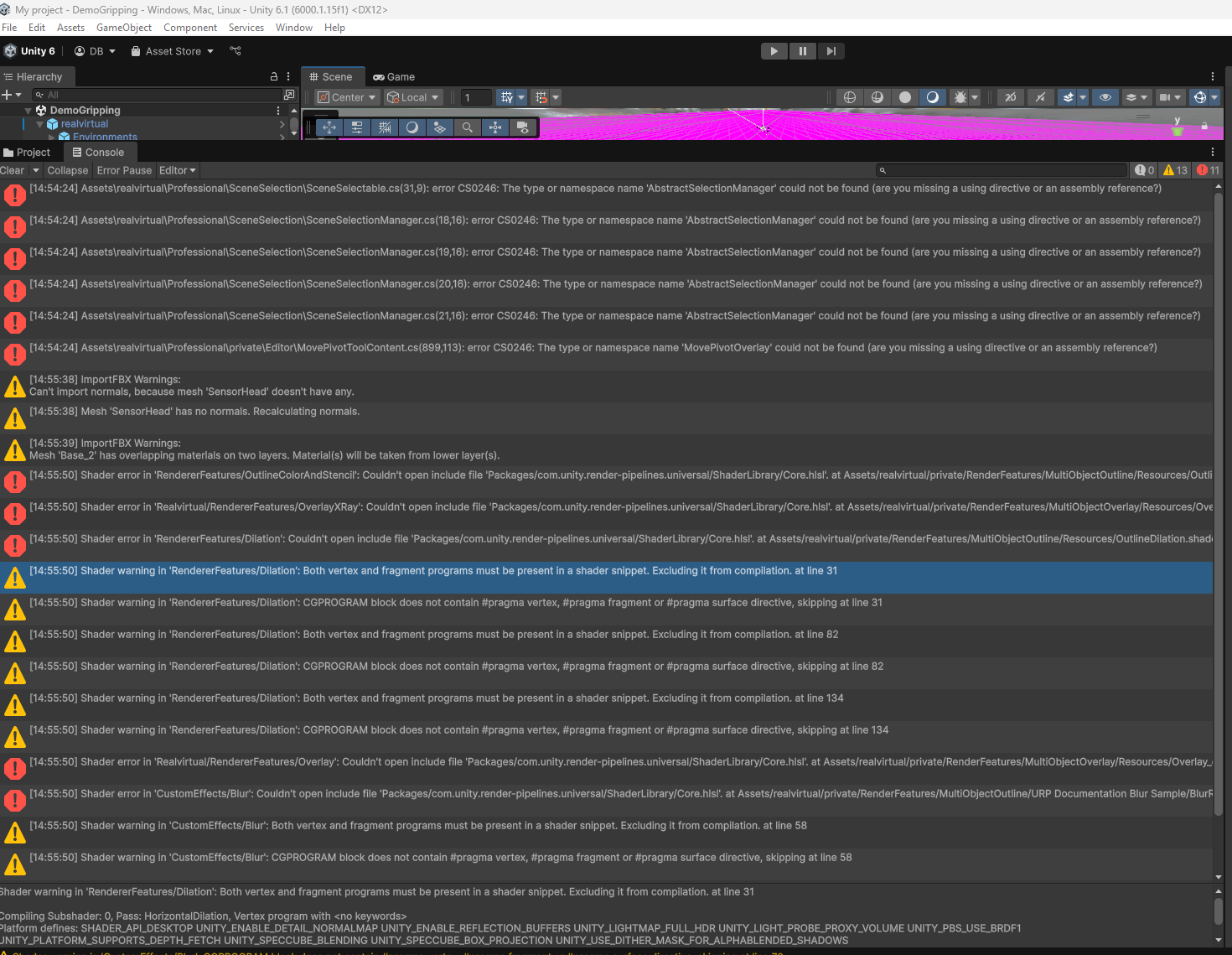
Am i doing it wrong?
Hi Dan, don't know what is special on your system because if we do the same (empty project...) everything works. It seems that the Standard Settings are not applied during your project setup.
We will check if this problem happens again with other customers but for the moment we have no idea what the issue on our side could be. But you can solve it.
Please add these two lines manually to ProjectSettings:
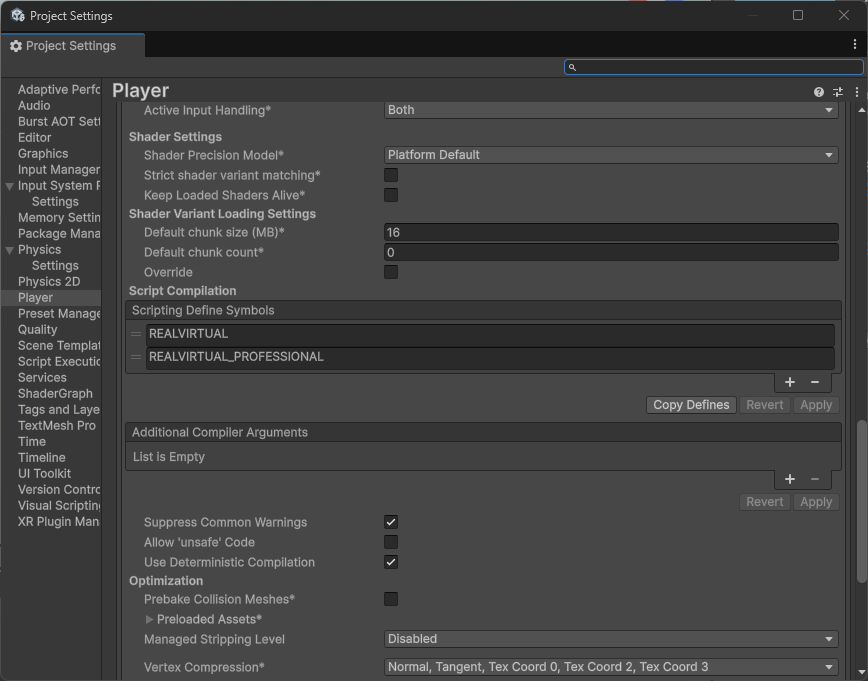
After this the project should compile as needed.
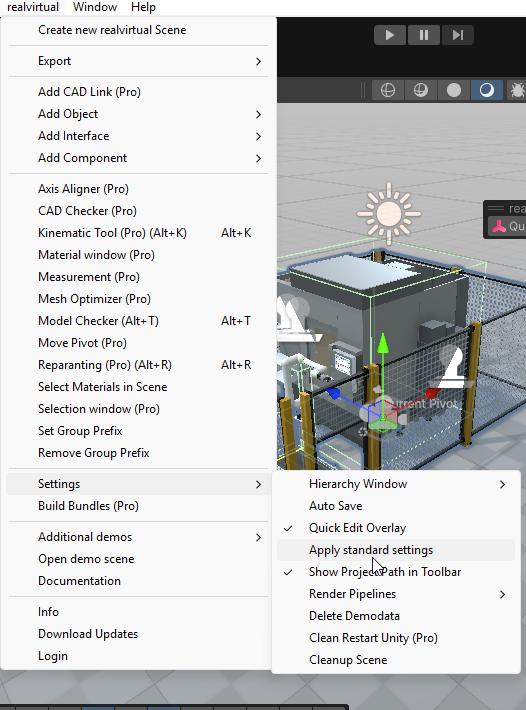
Now please set once manually (what should have worked automatically during installation) this menu option here:
RV6: Disable Quick Edit in Play Mode
Is it possible to turn off the activation of the quick edit menu in editor scene view in Play Mode?
I would like to manually activate and deactivate it with "F1".
It seems to use a lot of performance it play mode if it's on.
Senden Sie uns Ihr Feedback
Wir hören zu und setzen Ihre Ideen um.
Found bug in MeasureRaycast.cs

RV6: Disable Quick Edit in Play Mode
RV6: How to turn on the scene light?