Teilen Sie Ihre Erfahrunge und Wünsche mit uns und anderen Usern!
Teilen Sie Ihre Erfahrunge und Wünsche mit uns und anderen Usern!

 IO.Input.Machine.bMachiningFinished ist becomming true
IO.Input.Machine.bMachiningFinished ist becomming true
Hi,
I'm using the TwinCAT CNC Demo. The first part of the sequence works fine. The robot takes the part, puts it into the machine and the machine starts.
However it never ends. The IO point IO.Input.Machine.bMachiningFinished never becomes true?
Does anyone have an idea about this?
Thx!
Werner

 Modbus client support
Modbus client support
Hi RV.IO-Team,
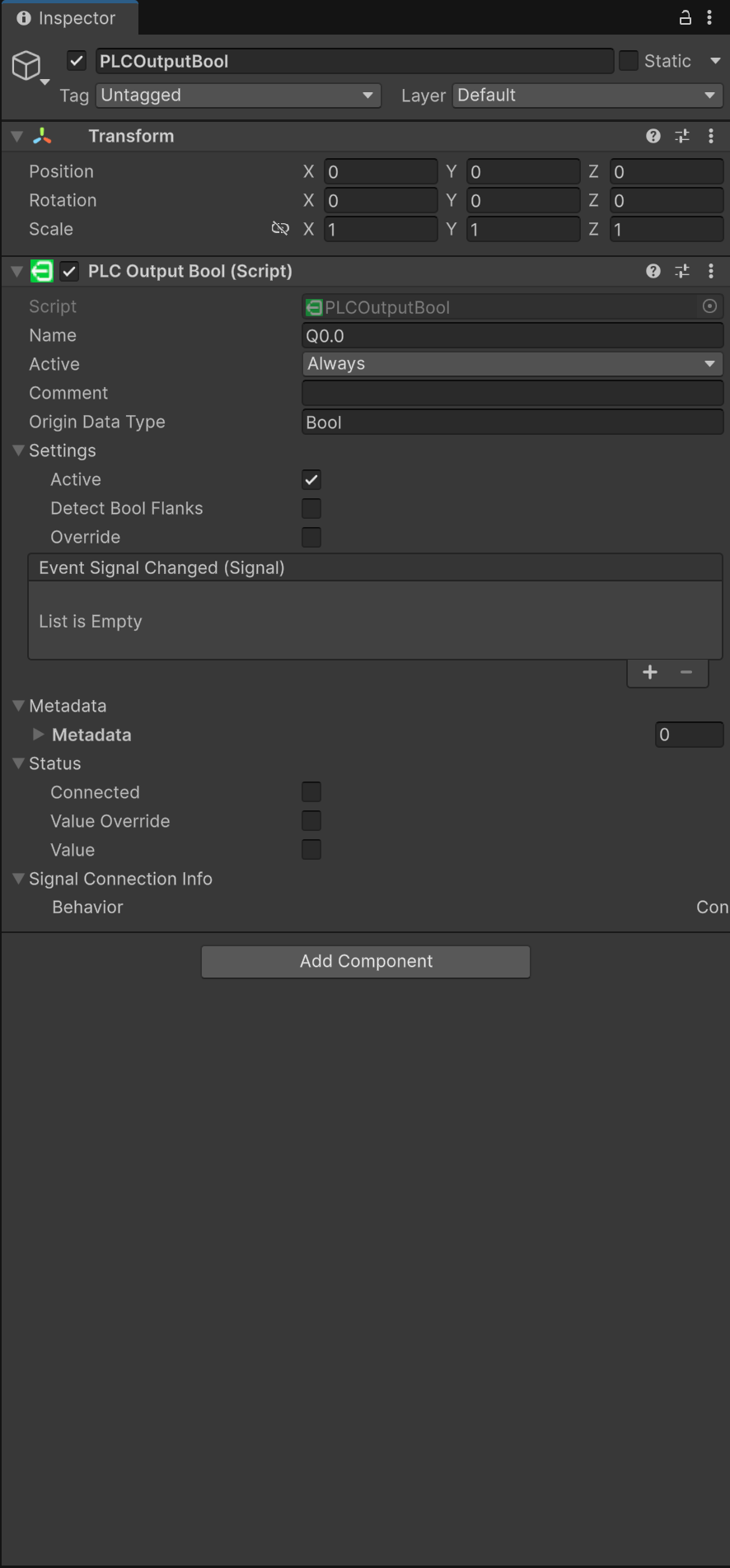
I’m currently testing Modbus communication between a Siemens S7-1514 (MB_SERVER) and realvirtual.io.
The TCP connection works and the client connects successfully, but the ModbusInterface script never populates the internal register arrays (e.g. outputregisters). Because of that the signals never receive values.
In the documentation I saw the note:
“Currently realvirtual.io can only be used as a Modbus master. Client support will be added in one of the next releases.”
Does this mean the polling/reading functionality is not fully implemented yet, or is there a recommended setup for reading holding registers from a PLC?
I would like to use Modbus for simulating valves and sensors in a digital twin, so knowing the intended workflow would help a lot.
Best regards
Andreas

6.3 version problem with S7 TCPIP
Hi all!
I am using the latest reavirtual. However, I am having problems with S7 TCPIP because the component displays "waiting to connect" and other error messages, and communication with S7-1200/1500 does not work, although it works with version 6.0.3. What could be the problem and what could be the solution? Thank you in advance for your hel

realvirtualController CPU 500ms+
1.realvirtualController CPU 500ms+
private static void PreFixedUpdateCallback()
{
_fixedUpdateFrameCount++;
for (int i = 0; i < _preFixedUpdateHandlers.Count; i++)
{
if (_preFixedUpdateHandlers[i] != null)
{
try
{
_preFixedUpdateHandlers[i].PreFixedUpdate();
}
catch (System.Exception e)
{
//The performance analyzer determined that the `Object.FindFirstObjectByType()` call was taking more than 150ms++, so it was moved inside the catch block to avoid errors on every refresh.
var controllerInstance = Global.realvirtualcontroller ?? Object.FindFirstObjectByType();
Logger.Error($"Error in PreFixedUpdate: {e.Message}", controllerInstance);
}
}
}
}
//! Callback executed after FixedUpdate
private static void PostFixedUpdateCallback()
{
for (int i = 0; i < _postFixedUpdateHandlers.Count; i++)
{
if (_postFixedUpdateHandlers[i] != null)
{
try
{
_postFixedUpdateHandlers[i].PostFixedUpdate();
}
catch (System.Exception e)
{
//The performance analyzer determined that the `Object.FindFirstObjectByType()` call was taking more than 150ms++, so it was moved inside the catch block to avoid errors on every refresh.
var controllerInstance = Global.realvirtualcontroller ?? Object.FindFirstObjectByType();
Logger.Error($"Error in PostFixedUpdate: {e.Message}", controllerInstance);
}
}
}
}
2.The bug in the MQTT code has been fixed in the reply.
MQTT IN/OUTPUT ERROR [Repair] / realvirtual.io Forum / realvirtual.io (formerly game4automation)

HelloWindow occasionally blocks CI builds when running Unity in batchmode
Hi,
when we trigger our build pipeline and run tests or build the project via script, from time to time the HelloWindow pops up and blocks the pipeline run.
Context
-
We are using realvirtual in a Unity project that we build and test via Azure DevOps.
-
Unity is started from the pipeline in batchmode (no user interaction, headless build).
-
Typical commands are like:
-batchmode -projectPath <path> -runTestsor-batchmode -projectPath <path> -buildWindows64Player <path> ...
Most of the time this works fine, but occasionally the HelloWindow appears during startup and seems to wait for user interaction. Since this happens on a build server without UI interaction, the process just hangs and the entire CI job times out.
Expected behavior
-
When Unity is running in batchmode (CI environment), realvirtual should not open the HelloWindow at all, or
-
There should be an option (e.g. a setting, scripting define symbol, or asset menu option) to completely disable the HelloWindow for automated builds/tests.
Actual behavior
-
Infrequently, the HelloWindow still appears during CI runs, even though Unity is started in batchmode.
-
This blocks the build/test pipeline until it times out.
Questions / requests
-
Is there a recommended way to disable the HelloWindow for CI/batchmode runs?
-
Could realvirtual internally check for
Application.isBatchModeand skip showing the HelloWindow in that case? -
If there is already a setting or flag to turn this off, could you point me to the correct configuration?
Thanks a lot in advance!

RE: HelloWindow occasionally blocks CI builds when running Unity in batchmode
Hi Ramon,
Thanks for the detailed report. You're right - we check for UNITY_CLOUD_BUILD but we're missing a check for Application.isBatchMode which is why it can still appear when running Unity with -batchmode for CI pipelines.
Workarounds until the official fix:
Option 1: Add DEV define to your build command (Recommended)
Unity.exe -batchmode -projectPath C:\Project -runTests ... -defineSymbols DEV
Option 2: Set the define via script before tests run Create an editor script that runs before your tests:
[InitializeOnLoad]
public static class CISetup
{
static CISetup()
{
if (Application.isBatchMode)
{
// Prevents HelloWindow from showing
PlayerSettings.SetScriptingDefineSymbols(
NamedBuildTarget.Standalone, "DEV");
}
}
}
Option 3: Patch locally In Assets/realvirtual/private/Editor/OnPostProcessImportAsset.cs line 142, change:
if (Game4AutomationImport && !Application.isPlaying)
to:
if (Game4AutomationImport && !Application.isPlaying && !Application.isBatchMode)
Fix: We'll include this batch mode check in the next release.
Thanks for reporting!

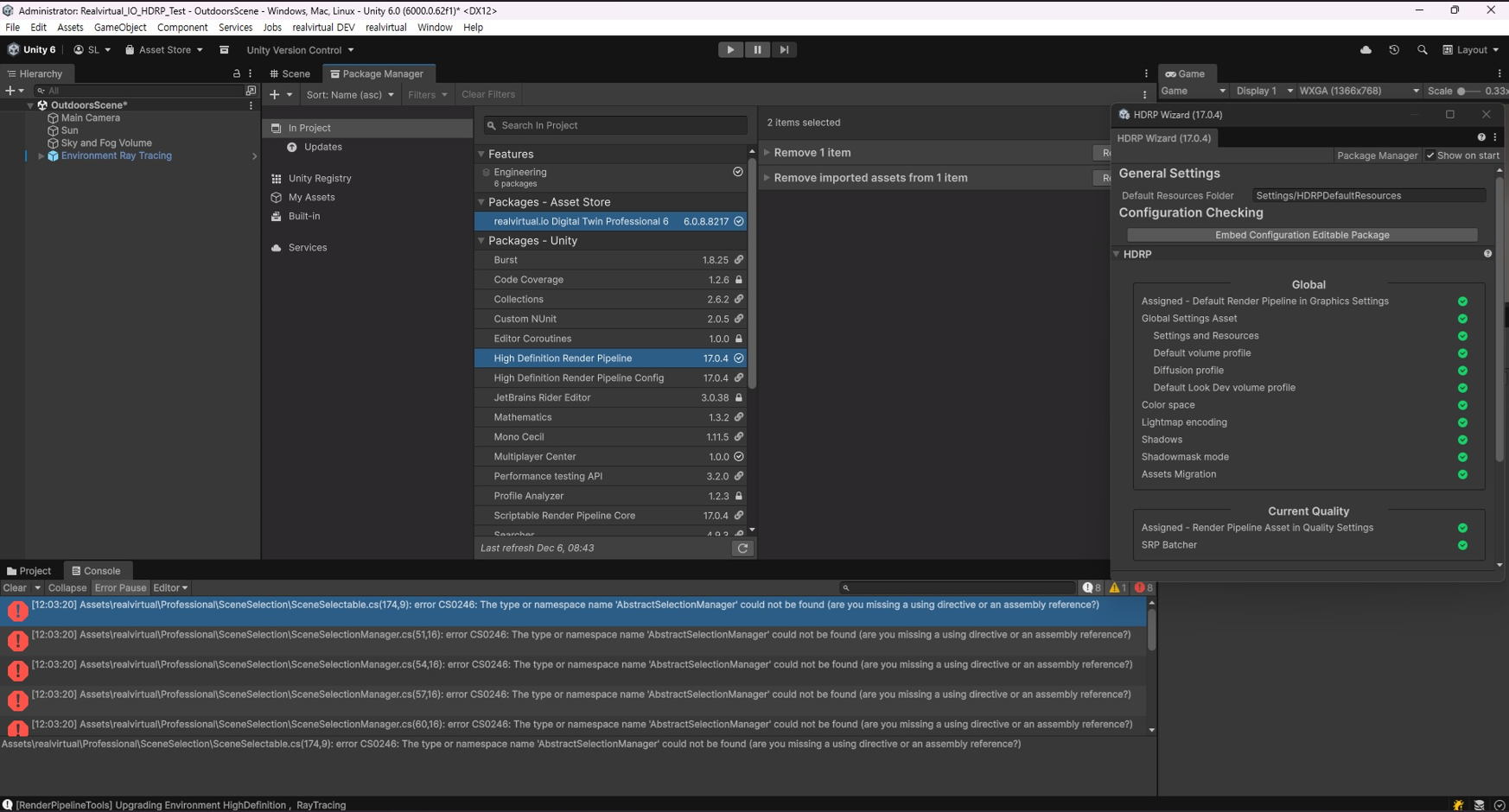
How to solve the complie error when realvirtual io package install in HDRP project
Dear,
Thanks for your support.
I have another problem when realvirtual io package install in HDRP project.
1) Unity 6 LTS Version (6000.0.62f1)
2) Create HDRP Project
3) Install Reavirtual IO Digital Twin Professional (6.0.8)
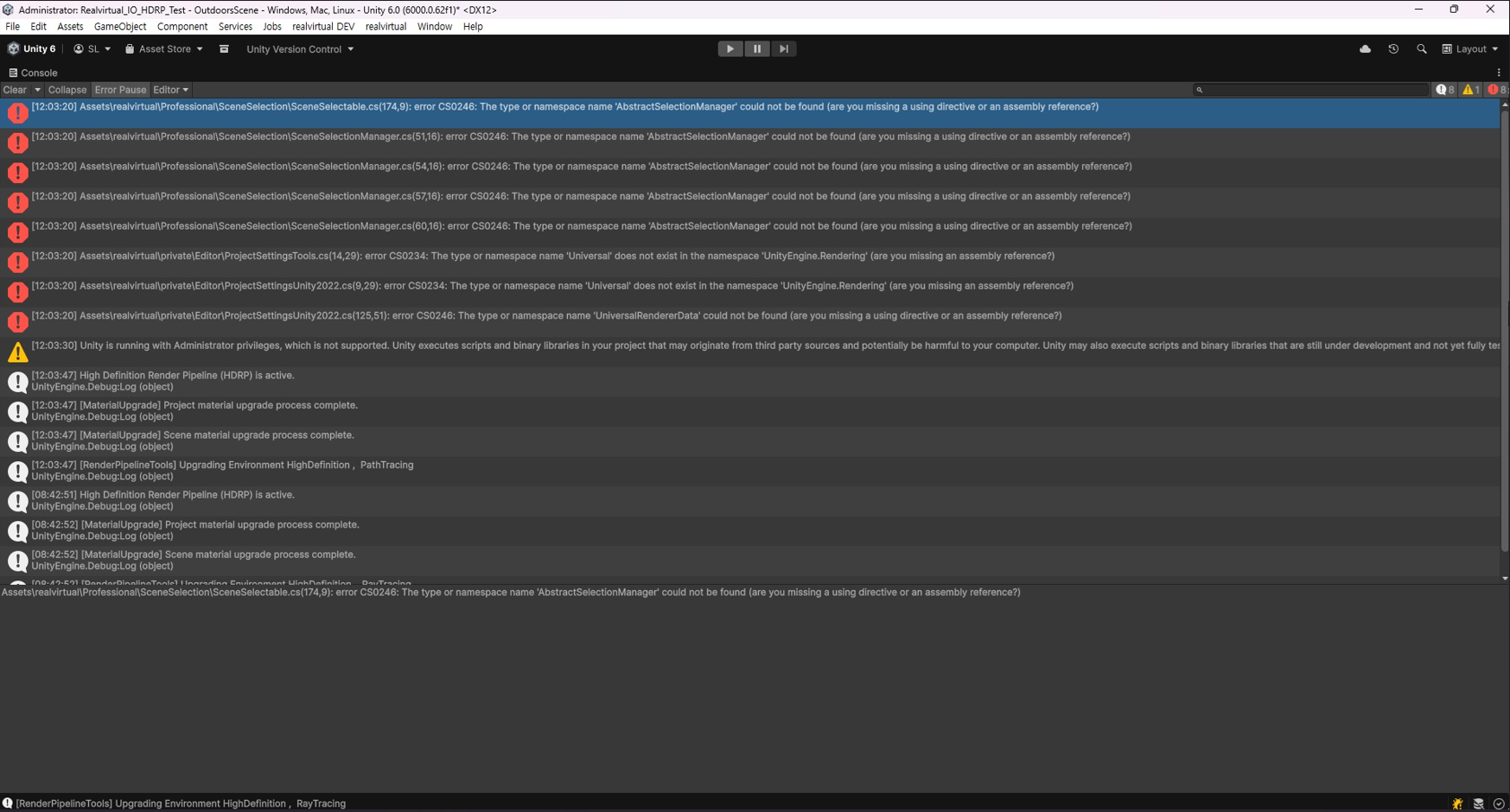
→ Compile error occurs (see image below)
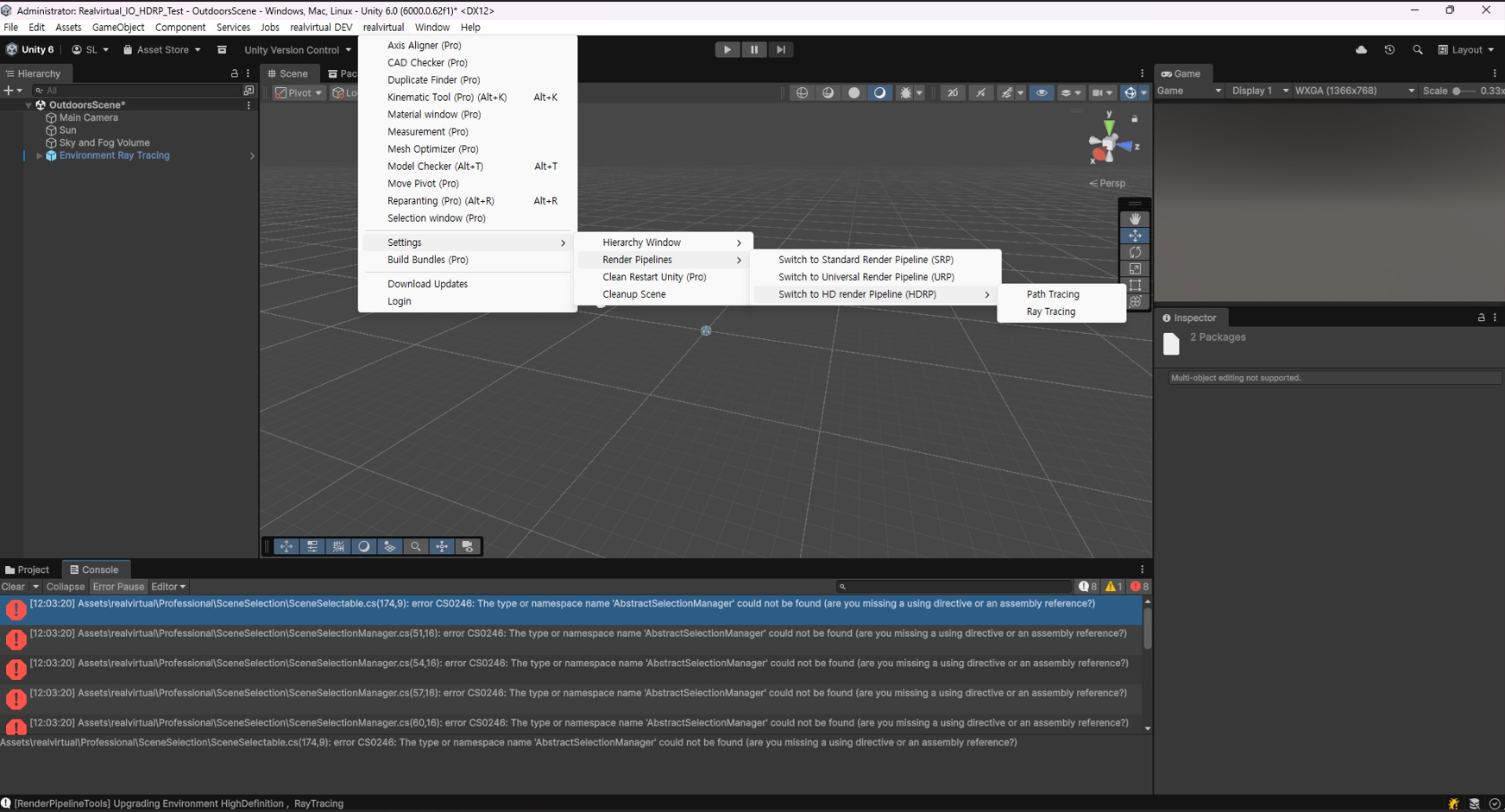
4) Switch to HDRP Menu (in realvirtual menu)
※ Render Pipelines > Switch to HD render Pipeline (HDR) > Path Tracing & Ray Tracing (Both Try)
→ Compile error still occurs (see image below)
I would like to request guidance on how to resolve this issue so I can use realvirtual io in HDRP project.
Best regards,
Seokhyun Lee
Hi,
usually you should not change render pipline. Some special materials for highlighting, the bottom, the fences... wont work in HDRP. If you are working with a totally new scene and taking care about the materials and rederers yourself it is ok. Also switching is a very complicated process.
I am sending you in a private message a beta of next release where the compile errors are gone away. If you are having issues when switching one project from URP to HDRP sometimes closing Unity and deleting the Library folder and restarting helps.
The private message will follow.
Best regards
Thomas
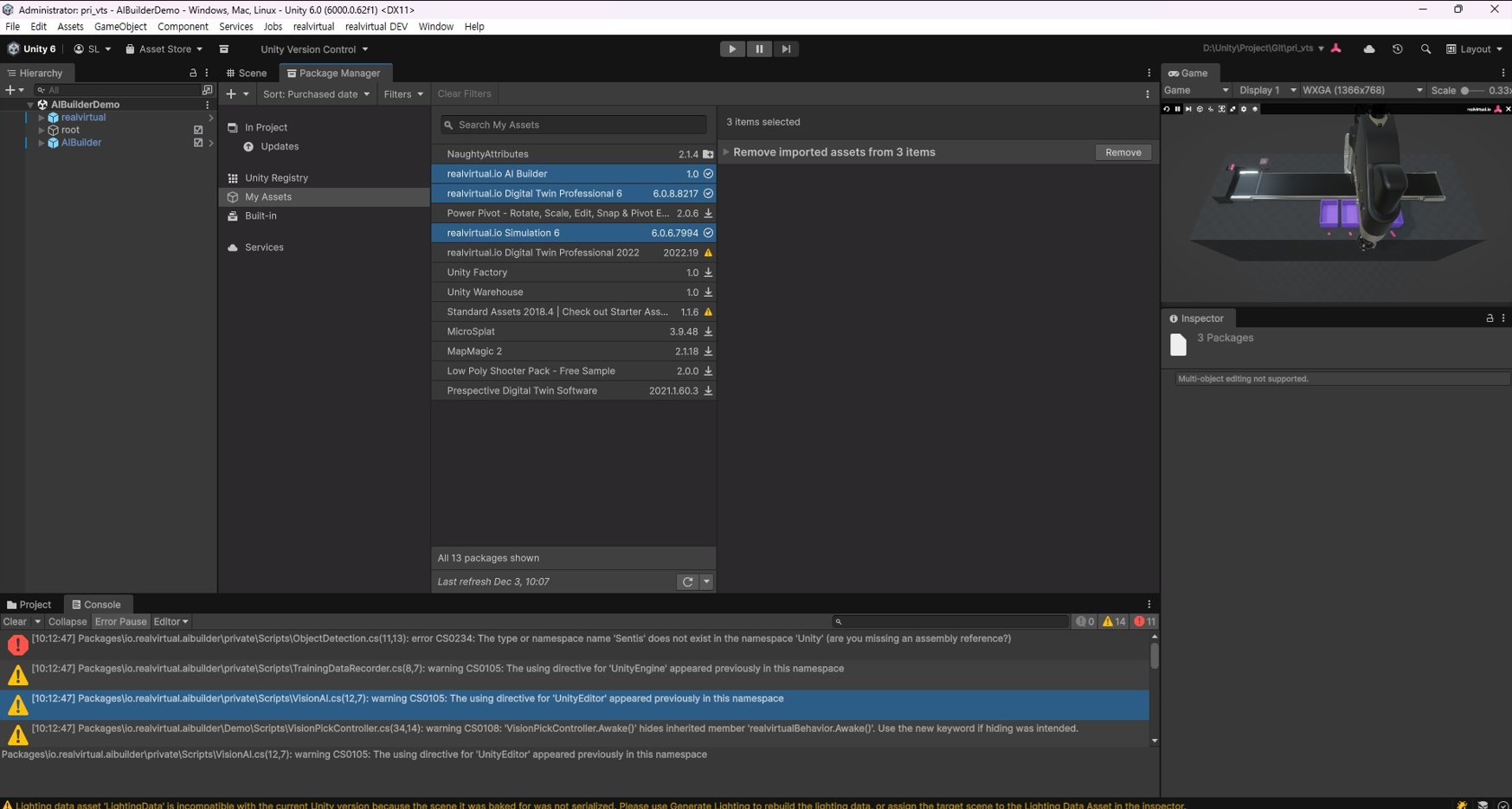
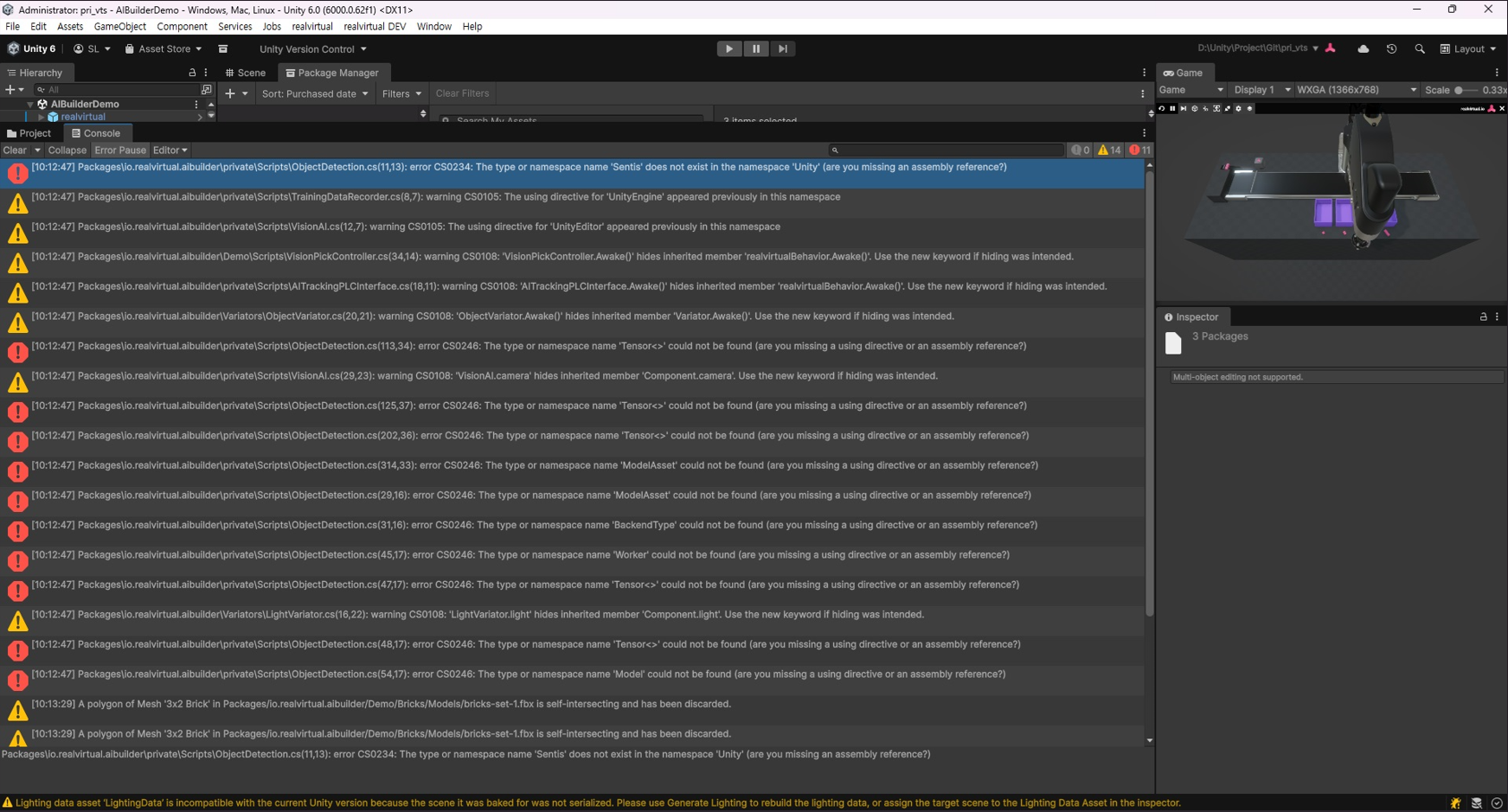
[Not Solved] Compile Error after realvirtual AI Builder Package Installation with Unity 6 LTS Version
Dear,
Sorry But,
The problem is not solved.
I'm having trouble again with a compile error after installing RealVirtual AI Builder with Unity 6 LTS version.
1) Unity 6 LTS Version (6000.0.62f1)
2) Install RealVirtual IO Digital Twin Professional (6.0.8) & Simulation 6 (6.0.6) → OK
3) Install RealVirtual IO AI Builder 1.0
→ Compile error occurs (see image below)
I would like to request guidance on how to resolve this issue so I can use RealVirtual AI Builder.
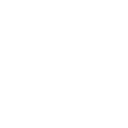
S7 connection - get_gameObject can only be called from the main thread.
Hi,
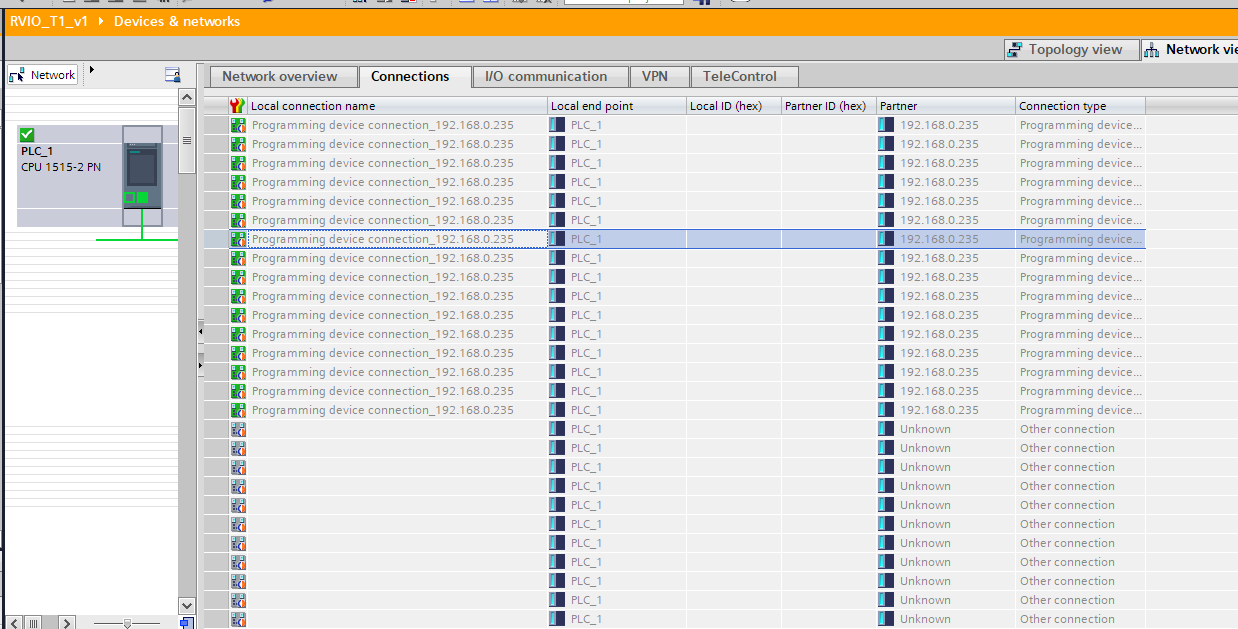
When trying to make an S7 connection (new empty scene) in the realvirtual.IO starter kit I have following issue.
The connection is OK and running in Scene mode, but once in Game mode, I see I have following error:
Connection failed: get_gameObject can only be called from the main thread.
Constructors and field initializers will be executed from the loading thread when loading a scene.
Don't use this function in the constructor or field initializers, instead move initialization code to the Awake or Start function.
In the connection view of TIA portal I see a lot of connection active.
Does anyone has any advise on how to solve this?
Unity version

siemens CPU 1515-2-PN

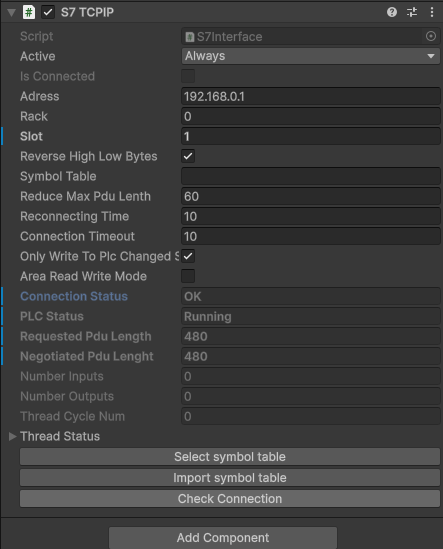
Connection failed: get_gameObject can only be called from the main thread.
Constructors and field initializers will be executed from the loading thread when loading a scene.
Don't use this function in the constructor or field initializers, instead move initialization code to the Awake or Start function.
Senden Sie uns Ihr Feedback
Wir hören zu und setzen Ihre Ideen um.
HelloWindow occasionally blocks CI builds when running Unity in batchmode
How to solve the complie error when realvirtual io package install in HDRP project

How to build a gantry
Error when importing asses
RV6.0.6 Creating a Build doesn't work