Teilen Sie Ihre Erfahrunge und Wünsche mit uns und anderen Usern!
Teilen Sie Ihre Erfahrunge und Wünsche mit uns und anderen Usern!

 RV6: How to turn on the scene light?
RV6: How to turn on the scene light?
I created a new RV6 scene and imported a model but it seems that the light is turned off.
If the same model gets imported into the demo scene it is illuminated.
How to fix that?
Model in new RV6 Scene:

Model in Demo Scene:

 Whether ROS2 communication function is supported during robot simulation
Whether ROS2 communication function is supported during robot simulation
Hello.
We are using realvirtual io pro version for robot Vision AI simulation.
Since our Vision AI program is based on ROS2, does the virtual robot we are making using realvirtual io support ROS2 communication?
If possible, please tell me which document or guide video I can watch to do it.
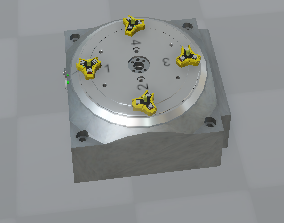
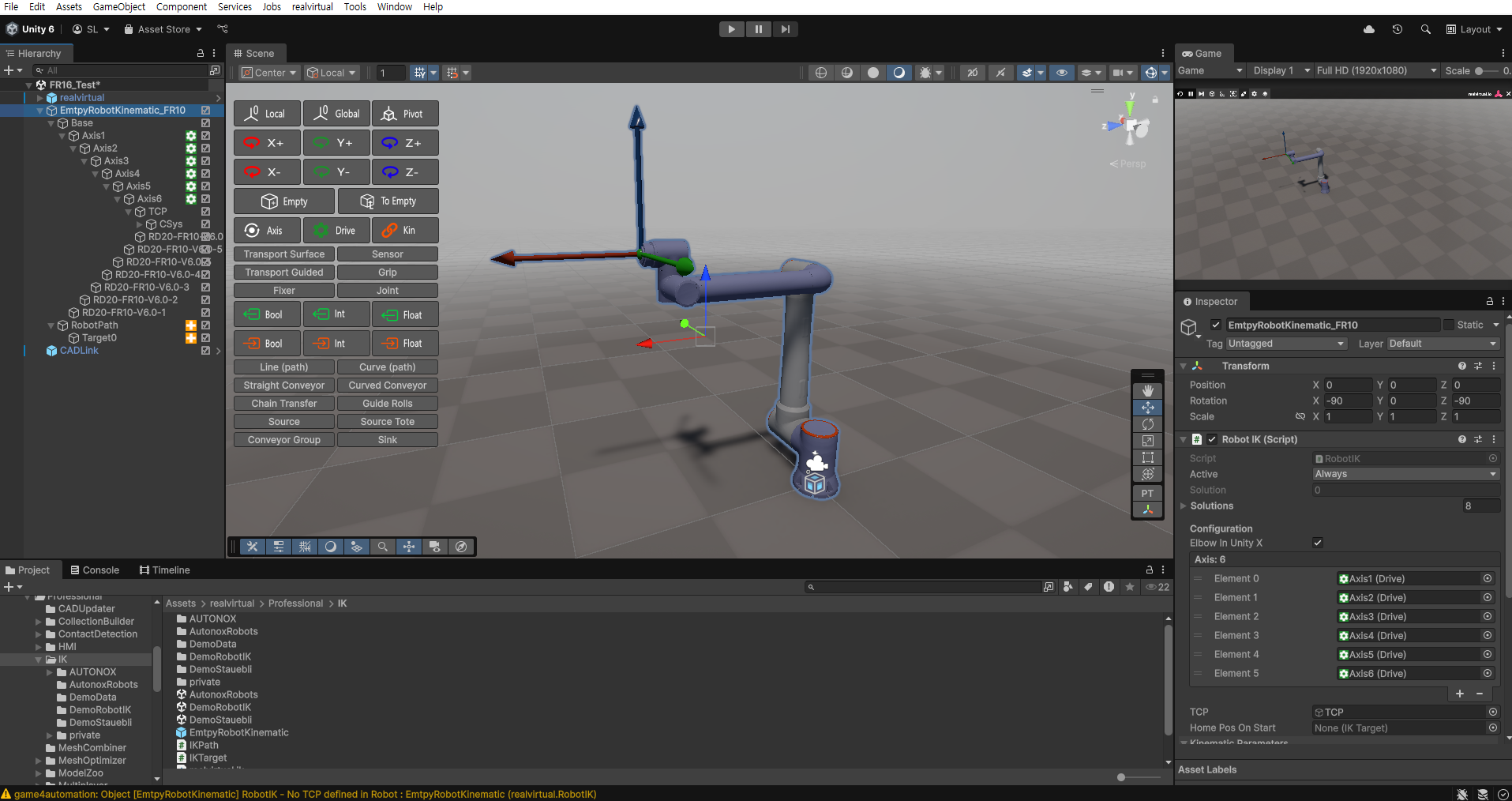
Robot IK for 6-axis multi-joint robot
I checked the document that among the 6-axis multi-joint robots, only robots that can align TCP, Axis6, 5, and 4 in a straight line are possible for IK to work.
How can I apply IK to a 6-axis multi-joint robot (a robot where Axis6, 5, and 4 are not aligned in a straight line) like the one in the picture below?

The "Combine Meshes (Pro)" function cannot be found.
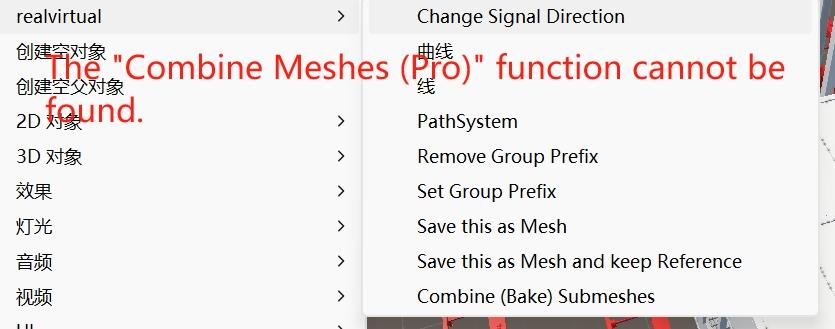
Why can't I find the "Combine Meshes (Pro)" function in the version I'm using? I have purchased the PRO version, so is this function only available in Professional 6?
One more question: Does realvirtual.io Digital Twin Professional 6 require a separate purchase? I noticed that 2022Pro has been discontinued.
 Found bug in MeasureRaycast.cs
Found bug in MeasureRaycast.cs
I found and fixed a bug in the MeasureRaycast.cs script. Originally the "Raycast to Layer" setting would not work. I replaced the following lines.
layermask |= (1 << LayerMask.NameToLayer("RayCastToLayer"));
layermask = ~layermask;
With this
layermask = 1 << LayerMask.NameToLayer(RayCastToLayer);
And it seems to work now. Just posting for others in case they have the same issue.

You are right - thanks a lot for reporting. Will be fixed in next release.

OPC UA PLC RECONNECT
If the PLC is disconnected, the application hangs/crashes.
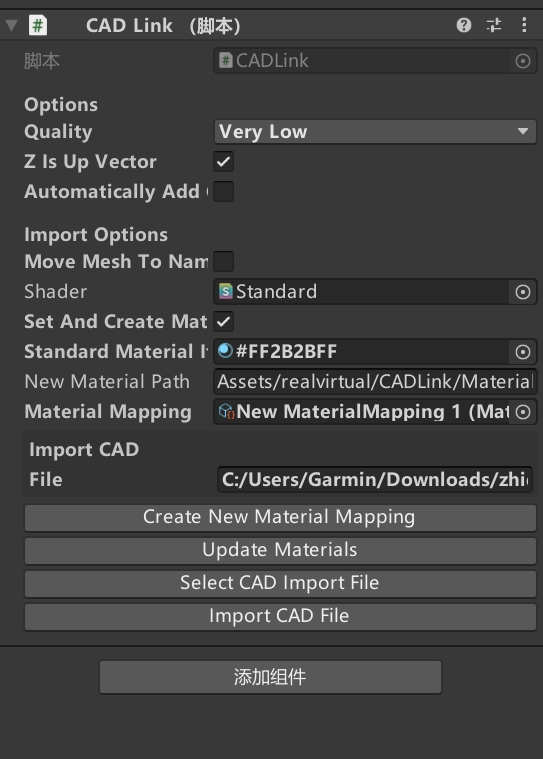
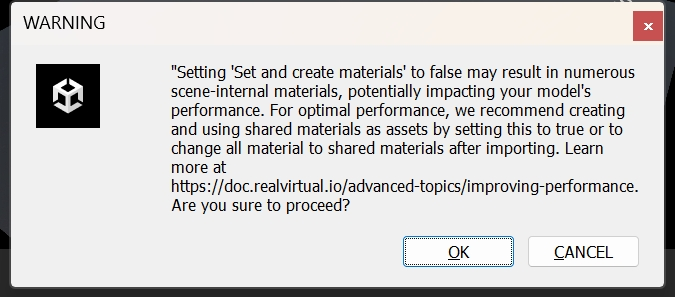
Regarding the issue of importing step from CADLINK
When importing step using CADLINK, "Set and create materials" has been clearly checked. However, after clicking "Import CAD File", this prompt still pops up. If the import continues, the program will crash.

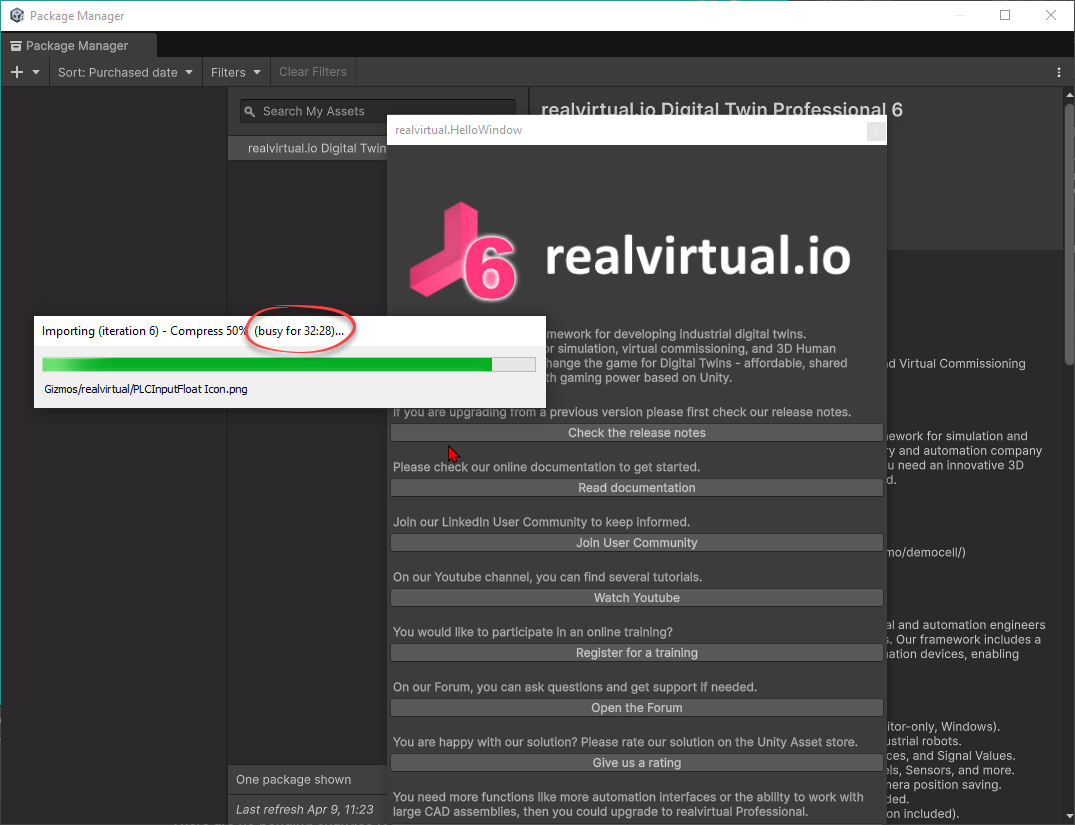
Installation hangs on PLCInputFloat Icon.png
When installing RealVirtual Pro from Package Manager the installation hangs on PLCInputFloat Icon.png when the HelloWindow appears. If I close the HelloWindow the installation continues.
PLC Input an PLC Output are disabled when pressing play
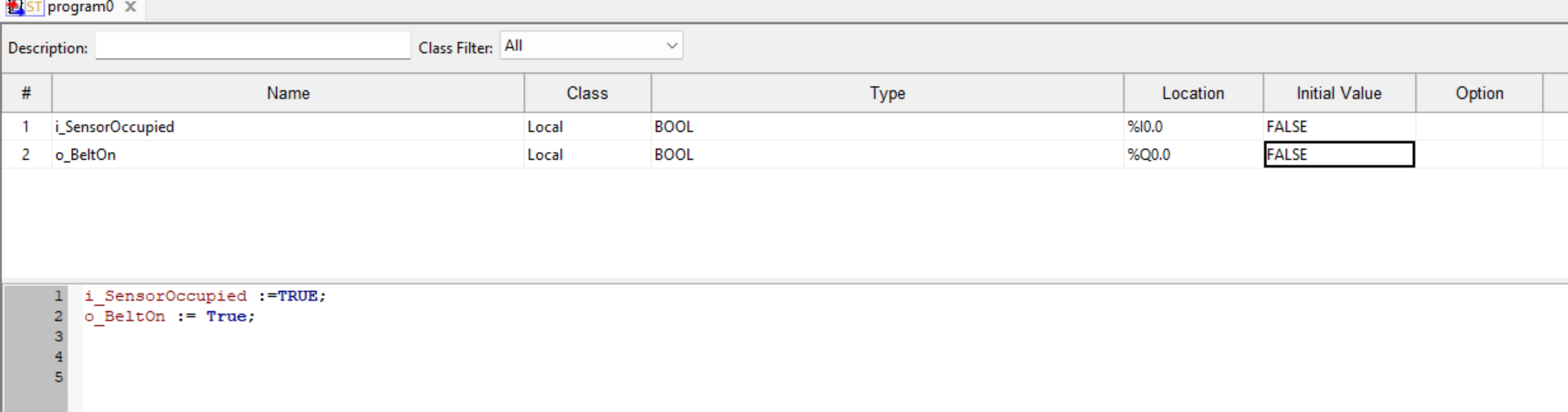
I use RealVirtual starter. I have added the S7Interface to my Unity project. I have created a softplc with OpenPLC with a very simple program
When I run it it works: values become true.
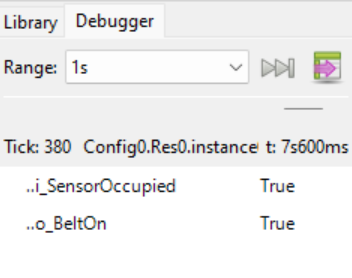
I compiled it to a runtime that also works.
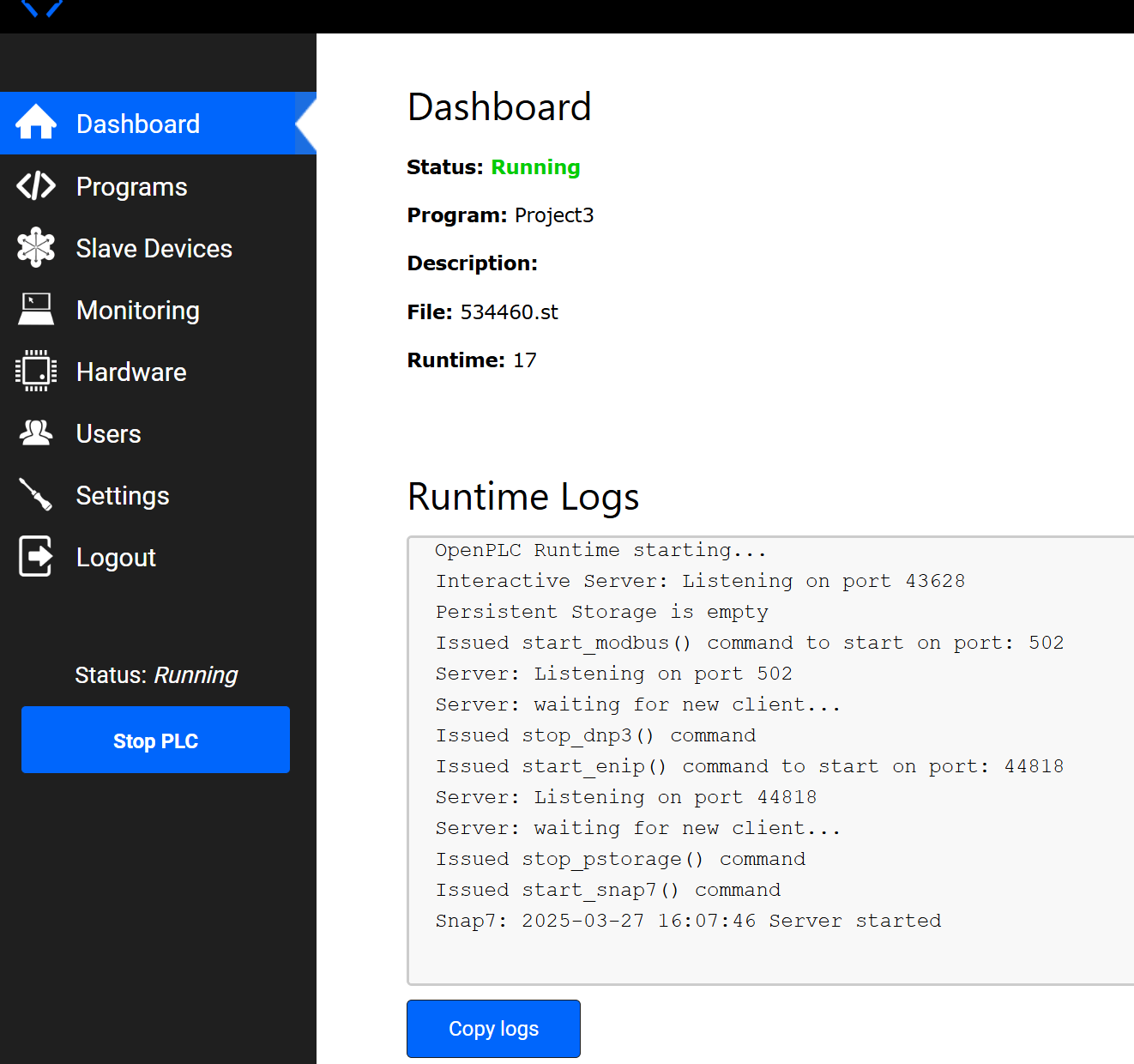
I have switched on S7 protocol for the softPLC
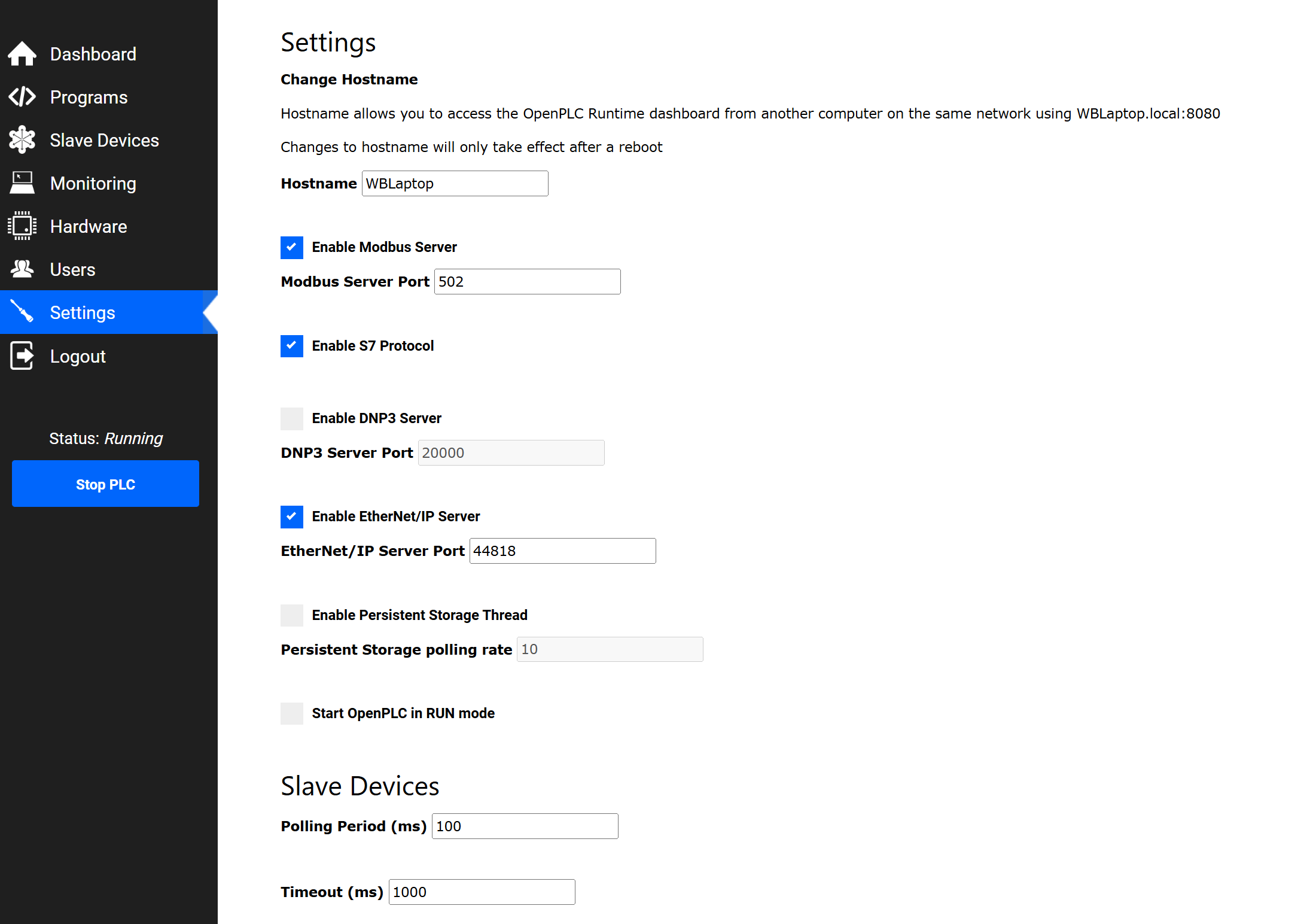
I can connect from Unity to the softplc
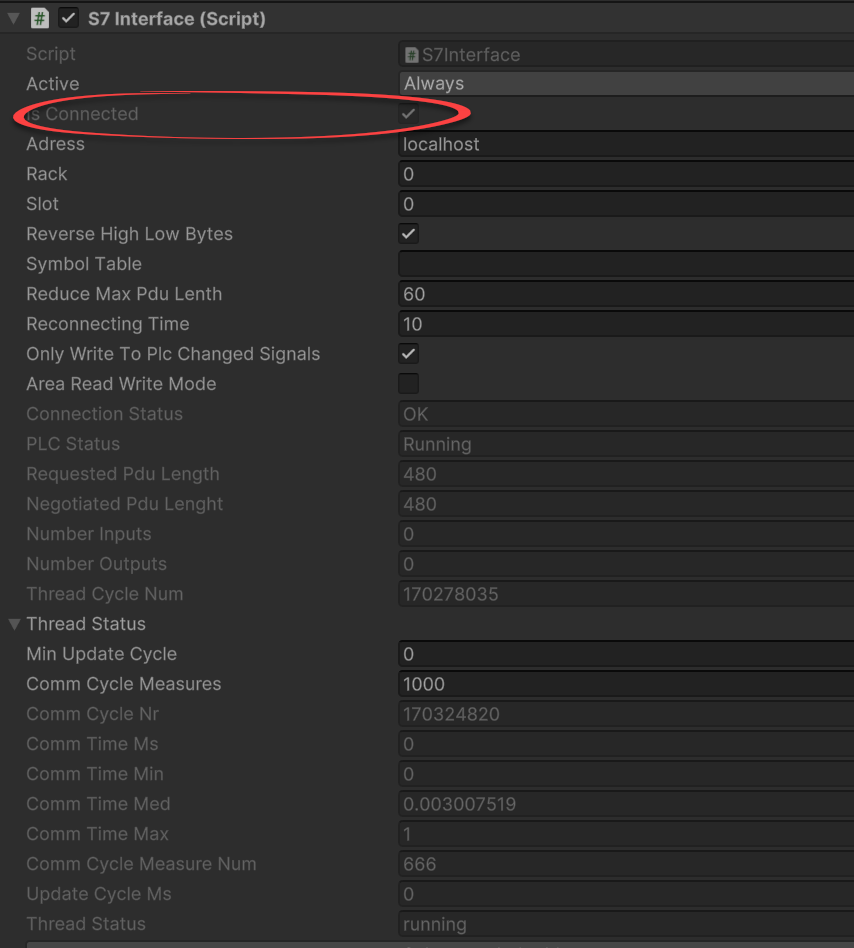
I have added the two signals to Unity
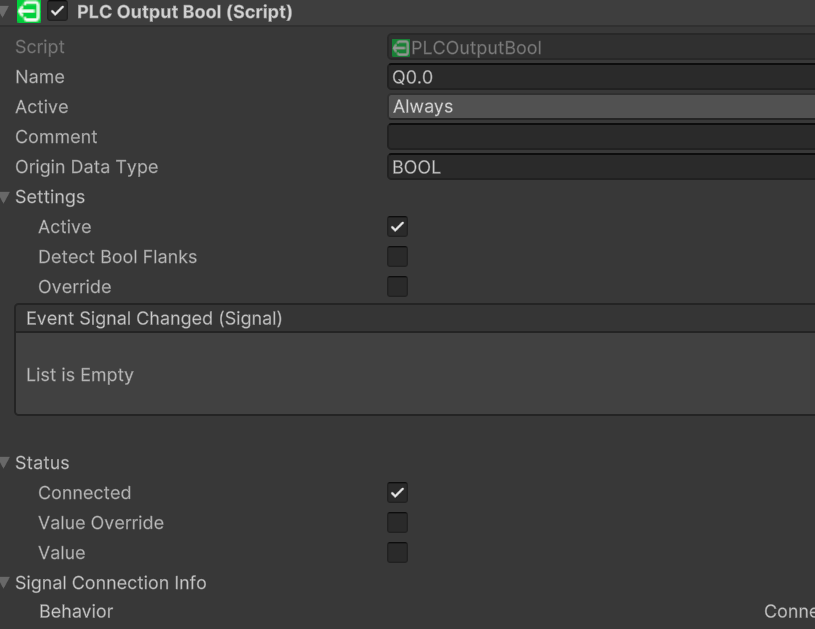
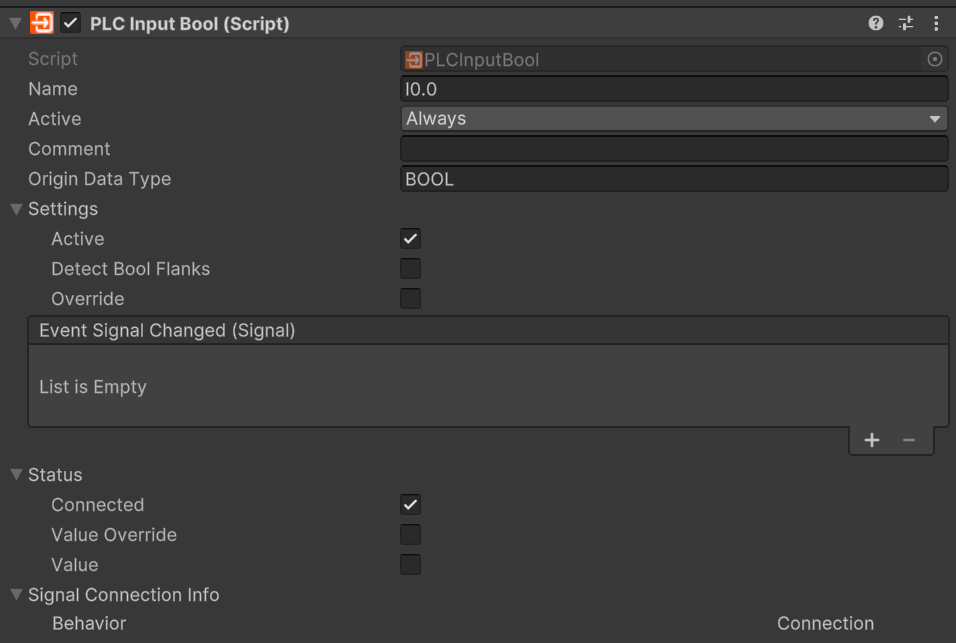
When I press Play in Unity the connection is made to the softPLC butboth PLC scripts are disabled.
Why is this ?
Senden Sie uns Ihr Feedback
Wir hören zu und setzen Ihre Ideen um.
Guided MUs not rotating on Guided transports in Unity 6
S7 Interface 100% CPU when no connection to PLC is available
OPC UA PLC RECONNECT
Found bug in MeasureRaycast.cs
Installation hangs on PLCInputFloat Icon.png
PLC Input an PLC Output are disabled when pressing play