Teilen Sie Ihre Erfahrunge und Wünsche mit uns und anderen Usern!
Teilen Sie Ihre Erfahrunge und Wünsche mit uns und anderen Usern!
 Digital Twin Professional 2021 mit Simulation 2022
Digital Twin Professional 2021 mit Simulation 2022
Hallo,
wie kann ich die oben genannten Pakete noch nutzen?
Ich habe die Assets direkt über unity gekauft im Dezember 2022.
Wenn ich jetzt ein frisches Projekt anlege (aktuelles Unity 2021 LTS) bekomme ich haufenweise Fehler.

Ask some questions about using Drive Component
Hello
I have a requirement to reproduce the gripping and placing of a SCARA robotic arm. My current idea is to divide the model into joints and add Drive components to the axis position of each joint, so that it can be moved, so as to achieve the process of motion restoration. But when I use the rotation function of the drive component, I find that it can only rotate all the time, can I set an angle for the drive component to rotate only the angle I set?
Or can you see if there is a better way to simulate the movement of a SCARA robot?
I don't need to add complicated IK algorithms, I just want to give the rotation angle of each axis of the SRACA robotic arm and let it rotate to the target position.
Thanks

Hi, you need to add a Drive behavior (https://doc.realvirtual.io/components-and-scripts/motion/drive-behavior) to the drive e.g. a Drive_DestinationMotor to control the drive and to send it via signals to certain destination position for each axis. Alternatively you could control the Drive via a script and use the Method Drive.DriveTo(float destination) of the Drive.
 PLCSimAdvancedCoupler startet bei Simulation nicht
PLCSimAdvancedCoupler startet bei Simulation nicht
Hallo Thomas,
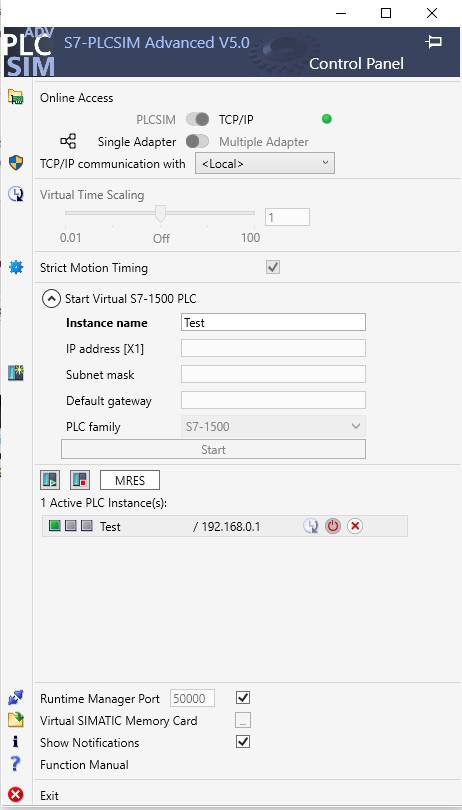
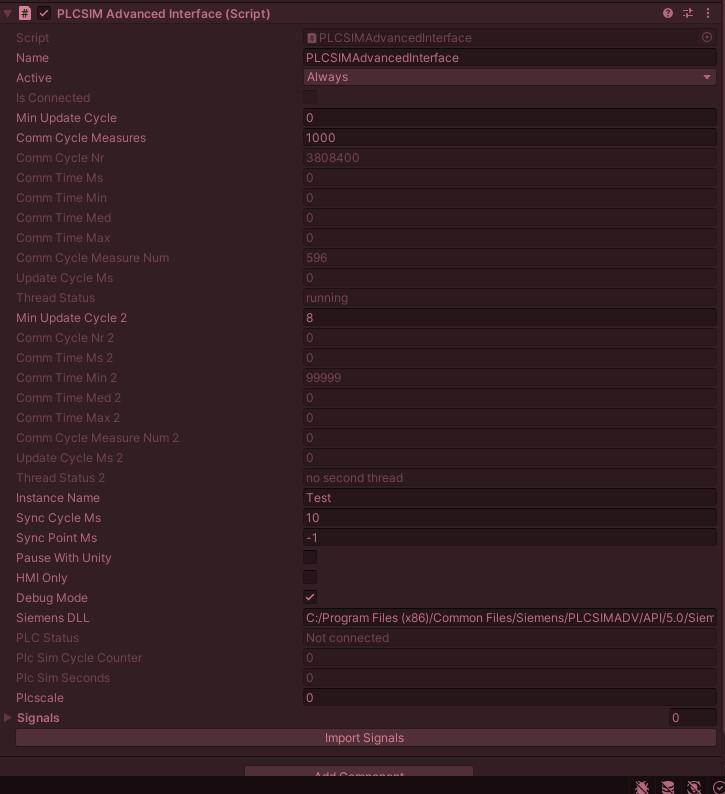
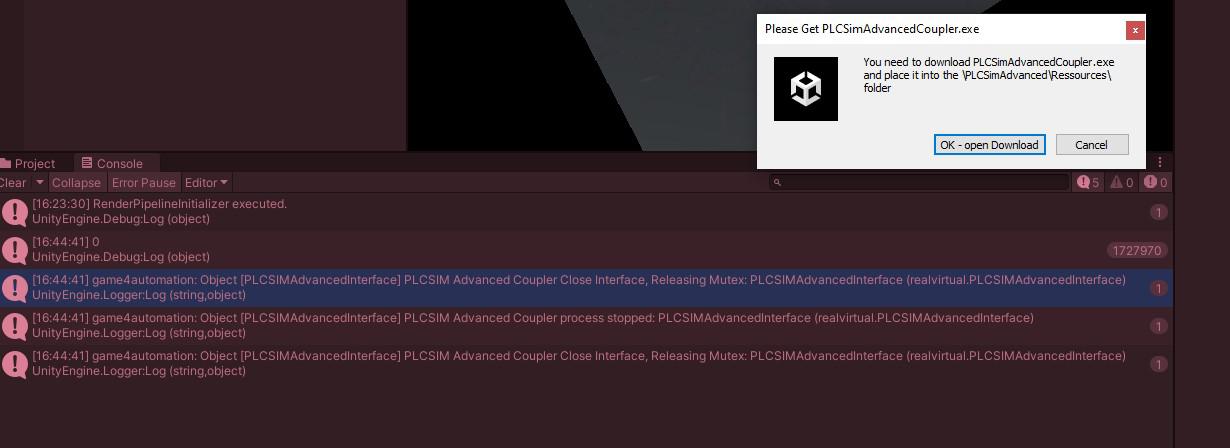
ich bekomme keine Verbindung von Unity zu PLCSimAdvanced V5.0. Bei Simulationsstart kommt jedes mal die Fehlermeldung (in Unity):
"You need to download PLCSimAdvancedCoupler.exe and place it into the \PLCSimAdvanced\Ressources\ folder"
Die genannte .exe habe ich im in meinem Projekt - Ablageordner unter:
C:\Unity Projekte\Zuluftanlage\Assets\realvirtual\Interfaces\PLCSimAdvanced\Ressources
abgelegt. Dennoch scheint Unity die .exe nicht zu finden. Auch die "Siemens.Simatic.Simulation.Runtime.Api.x86.dll" hab ich im entsprechenden Ablageordner für PLCSimAdvanced V5.0 abgelegt unter:
C:\Program Files (x86)\Common Files\Siemens\PLCSIMADV\API\5.0
Was ich weiter versucht habe ist:
- deinstallieren von "Npcap 1.71" und installieren von "Npcap 1.79"
- bilden einer Instanz in PLCSimAdvanced mit Konfiguration PLCSIM sowie TCP/IP
- deaktivieren der Windows - Firewall
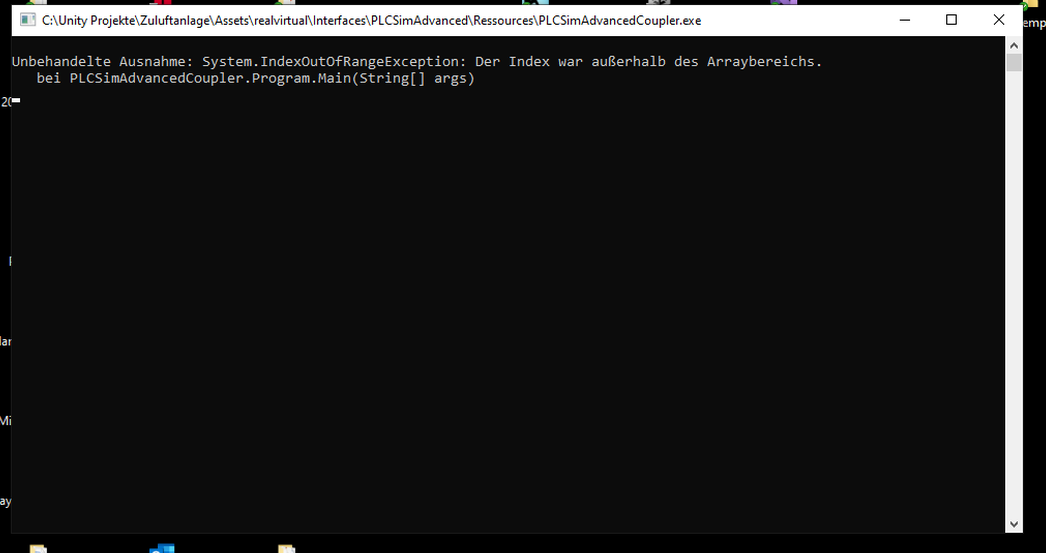
- starten der PLCSimAdvancedCoupler.exe manuell (Fehlermeldung siehe Screenshot!)
Geladen wurde die PLCSimAdvanced Instanz mit TIA Portal V18. Anbei befinden sich ein paar Screenshot.
Viele Grüße
David

Stop MU on conveyor by stopper
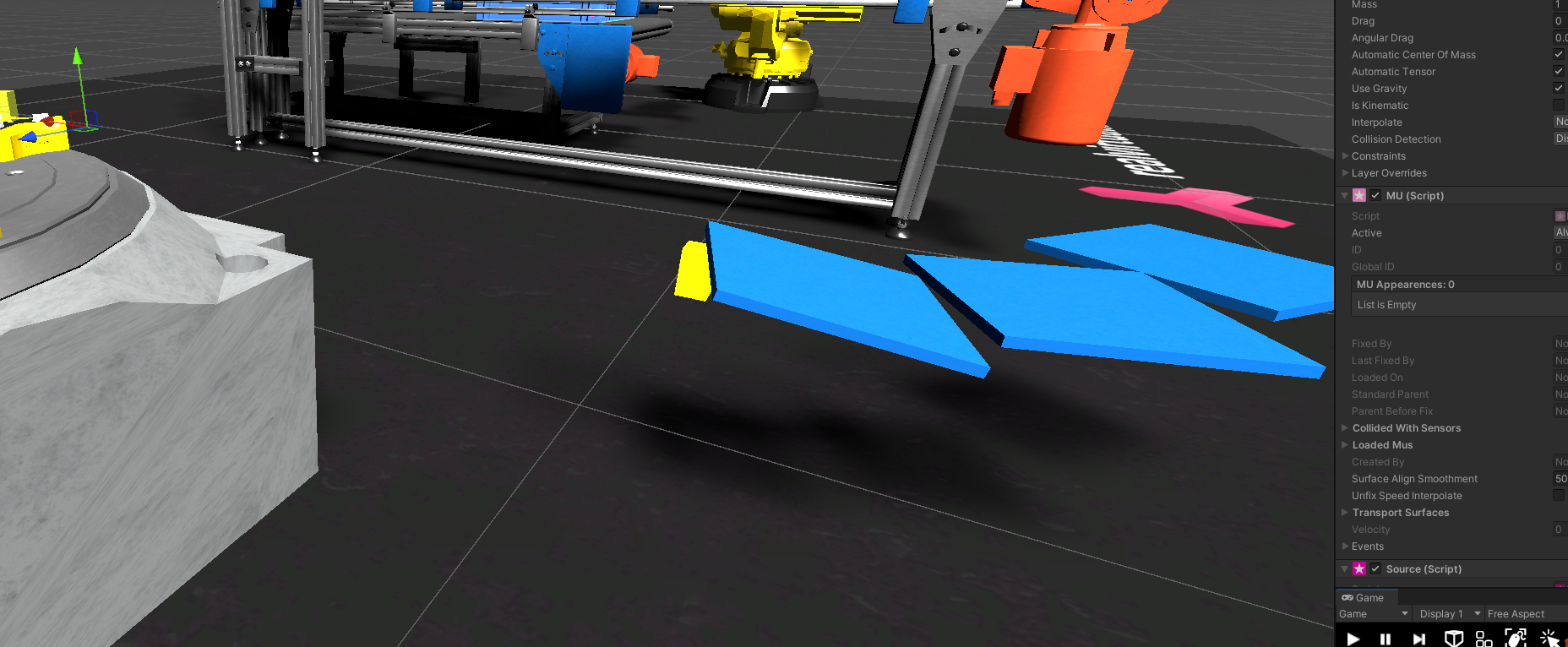
How can I prevent a jumping MU on a (guided) conveyor?
For this I used the invisible conveyor system from your demo project "Guided Transport".
The MU stops at the stopper but starts jumping up and down immediatetly.
Is there an easy way to prevent this?
I played around with the Rigidbody parameters and realised it stops if I activate "Is Kinematic". I guess I could do this by writing a scripts that activates this parameter at collision with transport layer.
Hallo,
anbei die Antworten zu Ihren Fragen:
Im Umlaufsystem stapeln sich die WTs ab einer Staulänger von 4 Wts. Wie kann ich das verhindern?
Bitte verwenden Sie ausschließlich guided Transport. Die Kombination aus normaler Transportsurface und guided Transport wird nicht funktionieren.
Wie kann ich ein "Transport Guided (Script)" unterbrechen (durch zB einen Heber) und danach wieder fortführen?
Hier gibt eine Umsetzung in der Demoszene zum guidedTransport, welche als Vorlage genutzt werden kann. (realvirtual/Scenes/DemoGuidedTransport)
Wie kann ich eine "Guideline" bei einem Transportsystem mit zwei "Transport Surfaces" einfügen?
Ein System wie in ihrem Beispiel wird immer nur mit einer Transportsurface umgesetzt, damit kann einfach eine Guideline ergänzt werden. Unity betrachtet immer nur eine "Collision".
Unter main/realvirtual/ui/button1 wird ein image verwendet. Wo finde ich die Datei?
Button-GameObject in der Hierarchie auswählen und im Inspector auf das definierte Bild klicken. Es wird dann im Projekt angezeigt.
Roboter bewegen sich zu bestimmten Positionen deutlich langsamer. Warum ist das so?
Die Bewegung richtet sich nach der langsamsten Achse.
Grüße Christin
Use only guided transport. Combining normal transport surfaces with guided transport will not work.
There is an implementation in the demo scene for guided transport that can be used as a template. (realvirtual/Scenes/DemoGuidedTransport)
A system like the one in your example is always implemented with a single transport surface, allowing an easy addition of a guideline. Unity only considers one "Collision".
Select the Button-GameObject in the hierarchy and click on the defined image in the Inspector. It will then be displayed in the project.
The movement speed is determined by the slowest axis.
Regards Christin
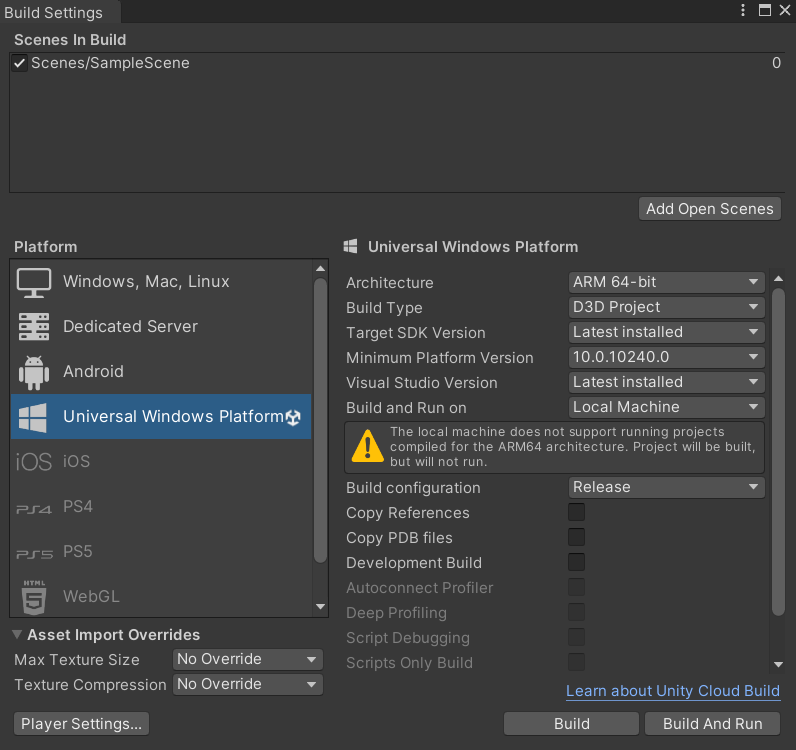
UWP Deployment for Hololens 2 does not complete successfully Unity 2021.3.21f1
Hello, it seems like we are having an issue with the OPCUA4Unity asset that we want to use for our Hololens build. We created a new project and were able to create a build for the Hololens without any problems. We then imported the asset from the Asset Store and tried to build again, but to no avail. We didn't add the demo scene into the build, so the problem is not with the scene itself. The build settings match the attached screenshot.
After creating the build in Unity, we open the build folder in Visual Studio and launch the .sln file. We select the Release, ARM64 and Device options and start the process. However, the build process gets stuck at a certain point, as shown in the screenshot.


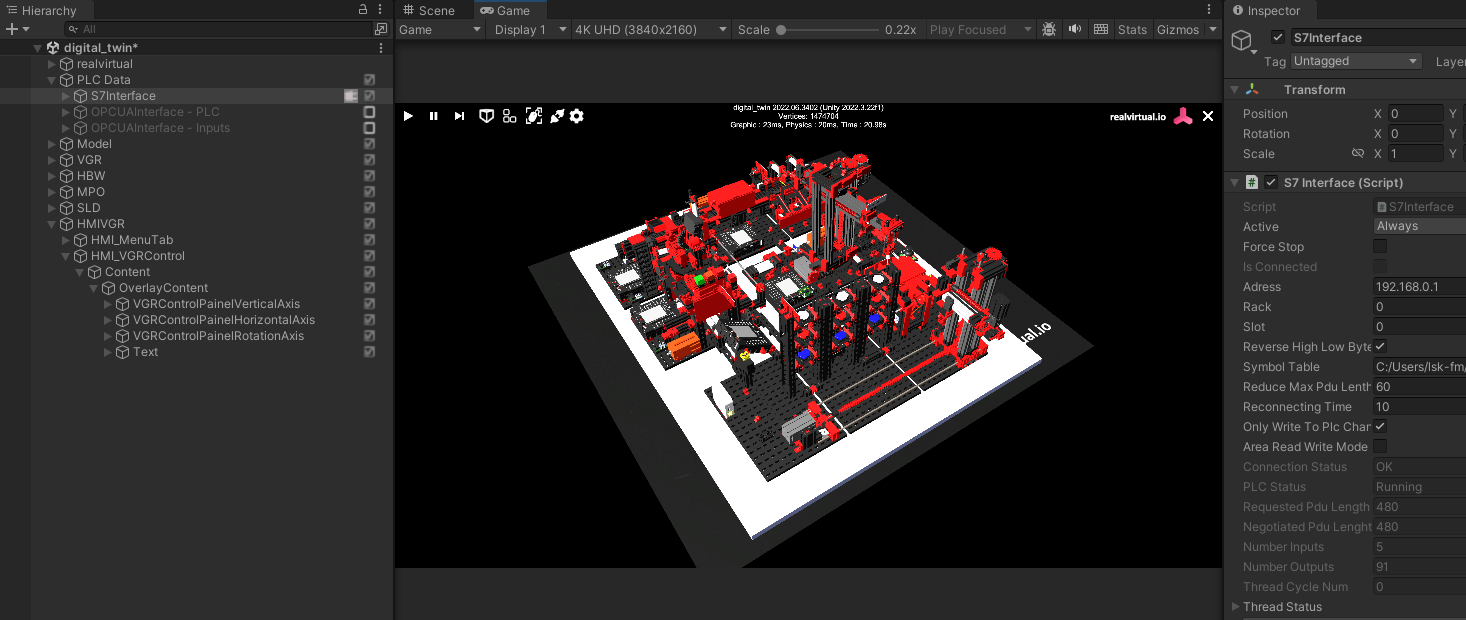
Override values (Unity to PLC) does not work as expected
Greetings.
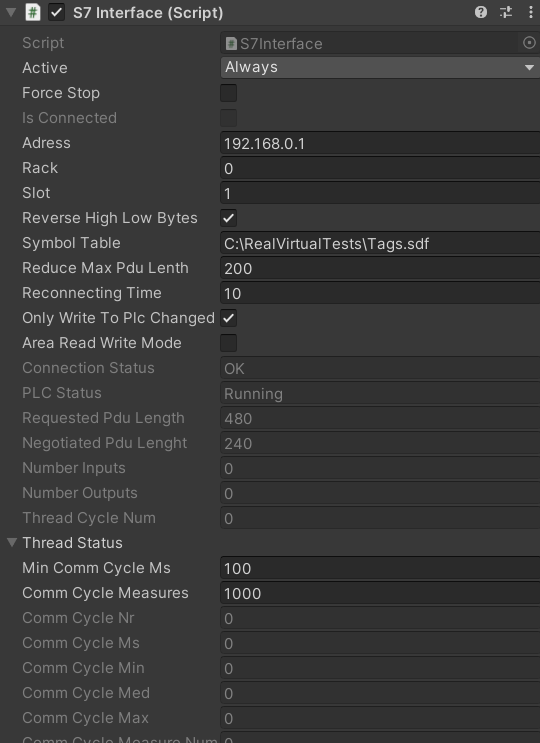
I am using S7 TCP/IP connection on a Unity project and I am physically connected to an S7-1200.
I am using various PLC Inputs and Outputs (created automatically from the .sdf file).
The PLC outputs are being read correctly on Unity, but when I force (overrite) a BOOL input value, the PLC detects the change but does not hold the new value. For example, I can see on the TIA Portal monitor window that the value is FALSE. I press write to True on Unity but the monitor on TIA Portal still shows False, although it did acknowledge the pulse (mabye it was a very short pulse)? Is this the way writing to PLC inputs works? By pulses? Because I would like to change a boolean (or any other type) value and hold that state for long periods of time.
These are my settings for the S7 Interface
And this is an example of a PLC Input component (Is it normal that the component is deactivated during runtime??):
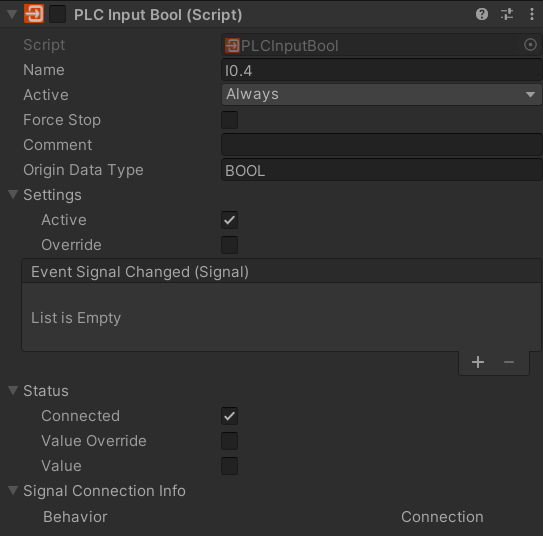
This is the correspondent GameObject during runtime:

Thanks for your time!
Hi Andreas,
here are my answers:
- This behavior is by design from Siemens. It's not possible to change this. If a hardware value is at a certain level, you can't overwrite it with software.
- This is not a bug; it's a common characteristic of all software solutions utilizing real Siemens PLC hardware. To avoid values being overwritten, you can modify your hardware configuration or use a simulated PLC.
To the best of my knowledge, you don't need to change the program itself. However, you do need to adjust the hardware configuration to ensure the symbol you are using does not conflict with a real hardware input.
Solutions that Work Without Changing Hardware Configuration for Siemens Controllers:
- Use PLCSimAdvanced
- Use Simit in Combination with a Simulation Unit
Can realVirtual built for web
When I choose the WebGl plat for build my unity projects which use realVirtual-io tool, the system has the follow error:
"Assets\realvirtual\private\Interfaces\SharedMemory\Editor\SharedMemoryInterfaceEditor.cs(9,26): error CS0246: The type or namespace name 'SharedMemoryInterface' could not be found (are you missing a using directive or an assembly reference?)"。
Hi,
it seems that you are using an old version. This issue has been solved. Some interfaces need to be deactivated before compiling because they are using functions which are not available in WebGL.
You should upgrade to the latest version or delete the interfaces (the full folder of it) which are not supported in WebGL. You can check the table on this page here: https://doc.realvirtual.io/advanced-topics/supported-platforms

OPCUA not listing all nodes
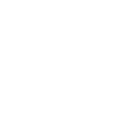
I'm encountering difficulties accessing nodes within the OPCUA Server. While I can establish a connection with the server, the nodes aren't being properly imported into Unity.
Examining the image below, it's evident that input nodes contain nested nodes. However, as depicted in the screenshots, Unity fails to list all the available nodes.
Image 1 - OPCUA Explorer
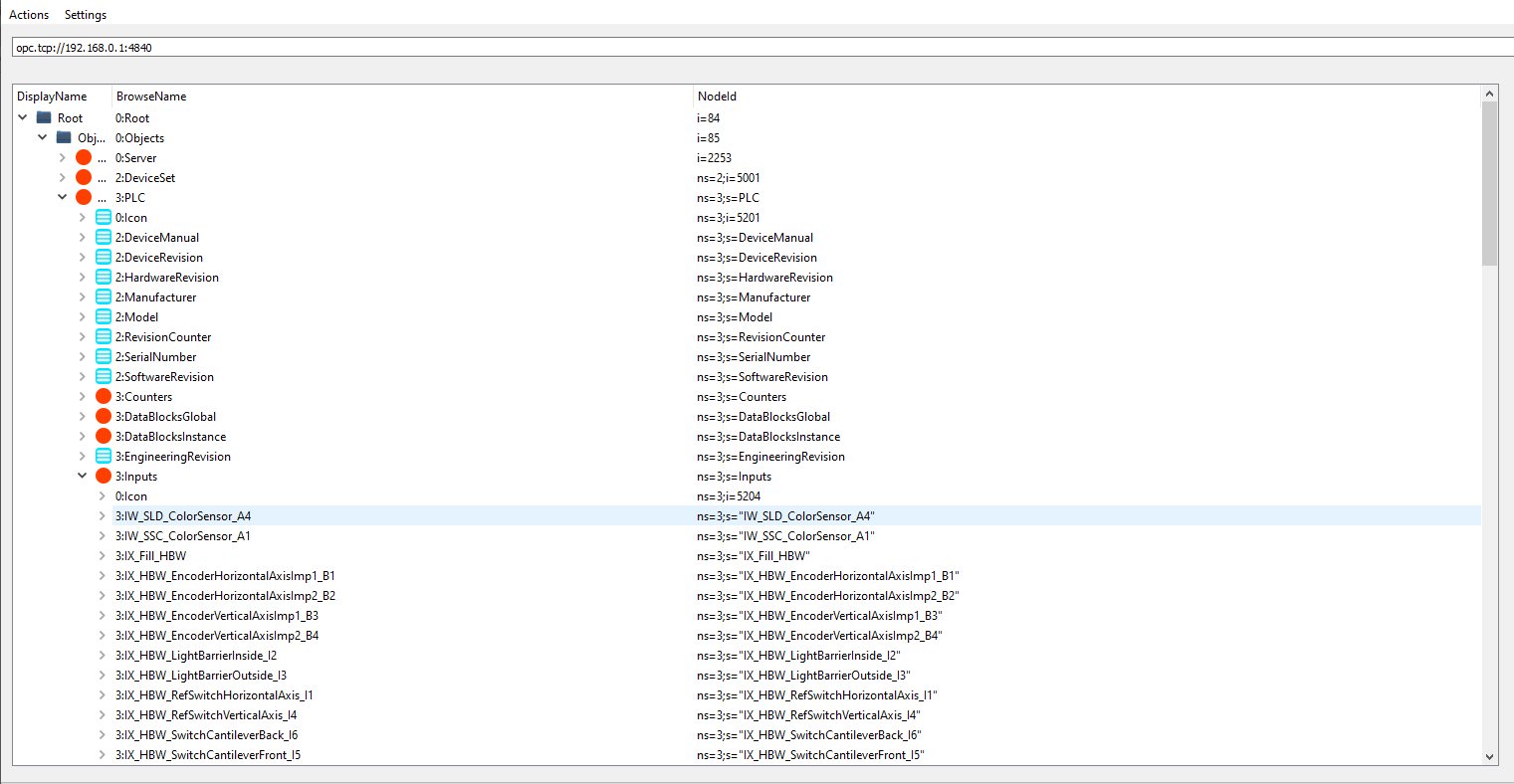
Image 2 - OPCUA Interface Unity

Help doing a basic project.
I want to do a project that looks like the demo, but i have tried to do it modifying the demo but i have no clue. I am looking on how to do a conveyor with a sensor at the end. I want to make two sources, two cans with different heigts, one one (i would like to make them appear random, but that i will try to do it further along the project since i guess is harder). Then the ones that are high enough to make the sensor go on, to grap them and put them on a parallel conveyor. When a can touches the first conveyor, i want the conveyor to stop until it is picked up.
later on, i would like to connect this to a plc siemens, so i would like to get started this project by projecting it on this goal (meaning to put the sensor as an output, something like that)
I am looking for help to put me in the path on completing the project because i do not know how to start and i have watched the tutorials. Any help is appreciated.
thank you
 HMI UI not showing in Play mode
HMI UI not showing in Play mode
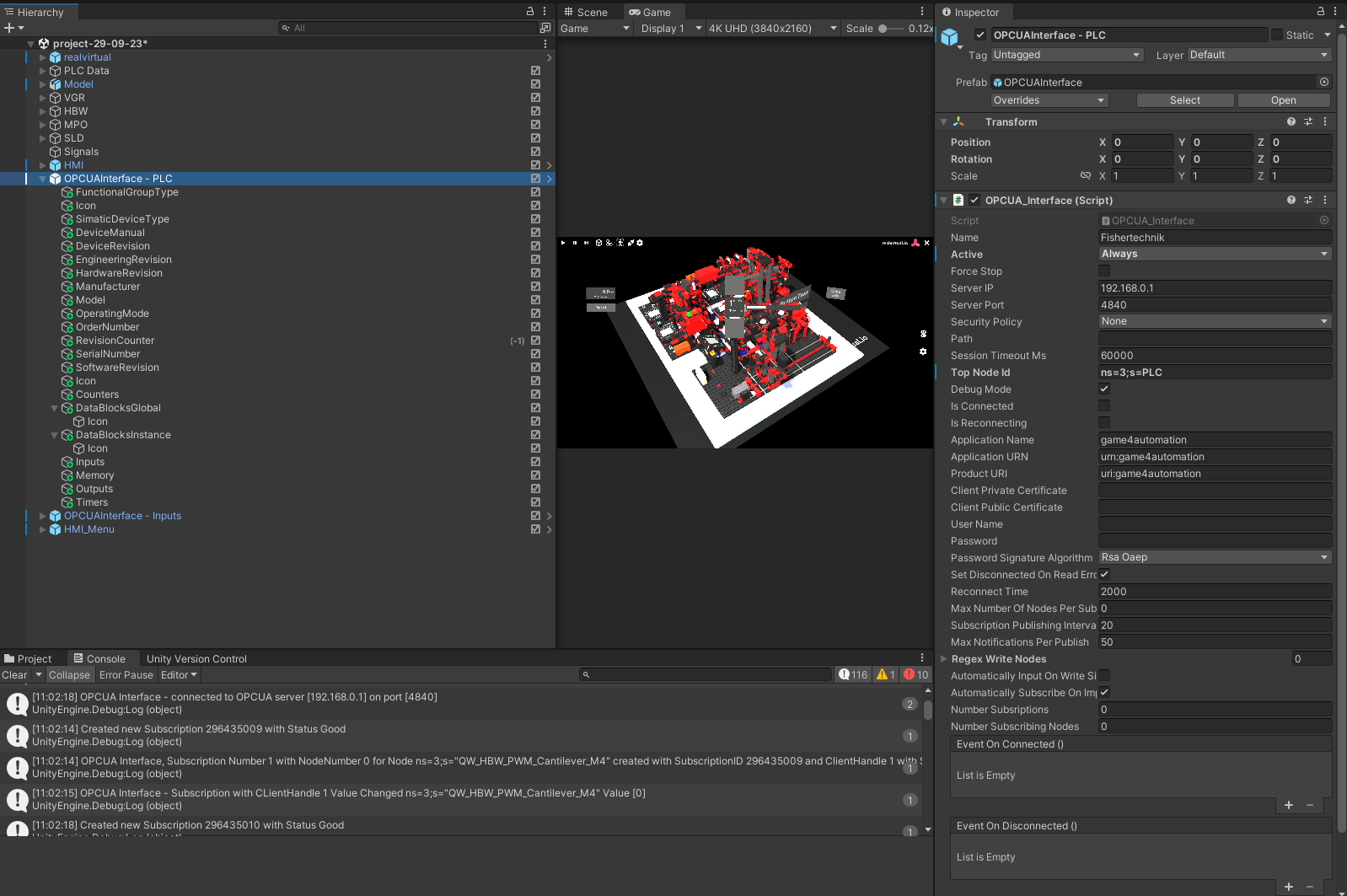
I created an HMI object with 2 HMI tabs. The first tab stores a drop-down menu, and the second tab stores 3 HMI Panel World Space with HMI buttons. When I use Unity in Scene and Game mode , I can visualize the changes. However, after starting the simulation ( Play mode ), all the objects inside HMI wont appear on the game. All elements are on the UI layer.
Scene Mode
Game Mode
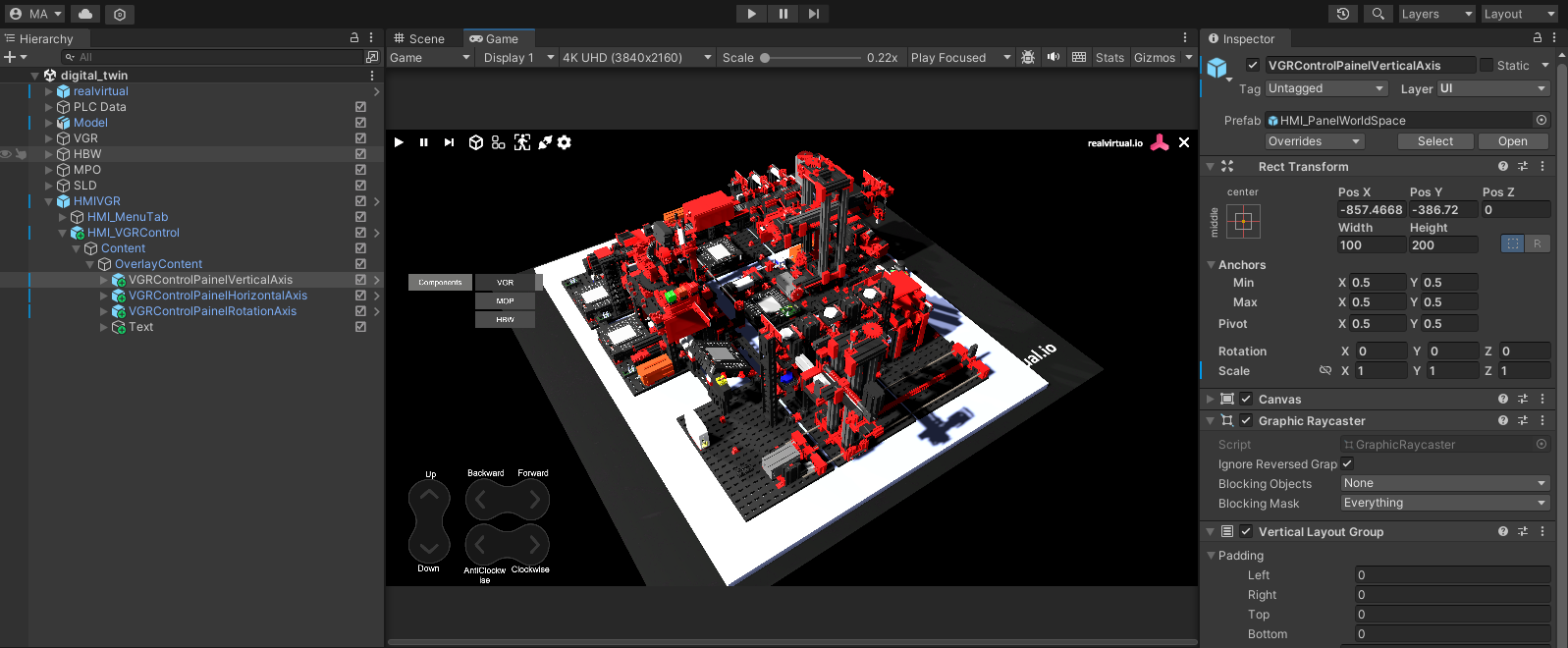
Play Mode
Hi,
after reviewing your images again, it appears that you're not using tab buttons to switch between the tabs. In this case, please enable "Tab Activated" within the "HMI_Tab" component to activate the tab when "Play" is started. Let me know if this solves the problem.
Regards Christin
Senden Sie uns Ihr Feedback
Wir hören zu und setzen Ihre Ideen um.

OPCUA not listing all nodes
Ask some questions about using Drive Component
HMI UI not showing in Play mode