Teilen Sie Ihre Erfahrunge und Wünsche mit uns und anderen Usern!
Teilen Sie Ihre Erfahrunge und Wünsche mit uns und anderen Usern!

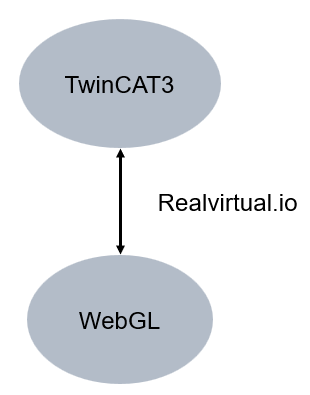
 Do you have any suggestions about how webgl(unity3D) communicates with twincat by realvirtual.io
Do you have any suggestions about how webgl(unity3D) communicates with twincat by realvirtual.io
as i descripte,i want to complete a machine digital twin which is similar with the example demo from your website shows.
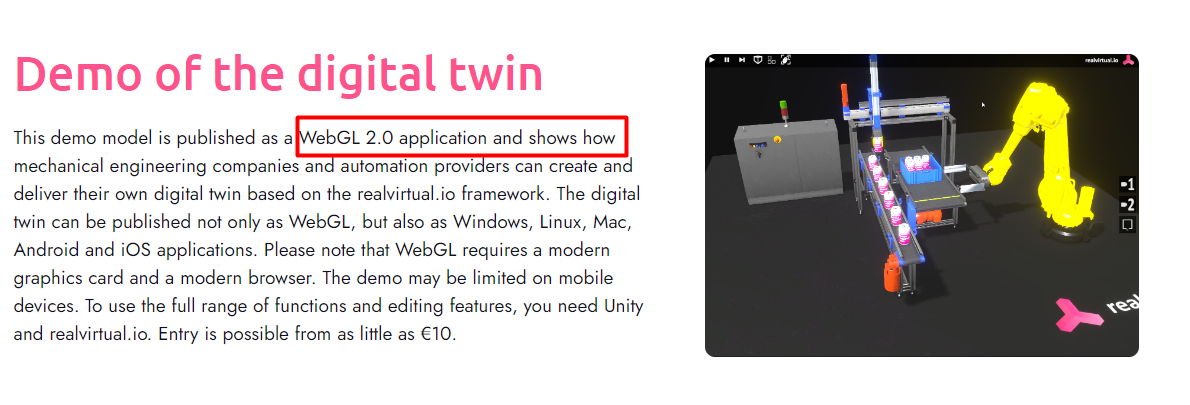

I don't think, that we are publishing a special video for TwinCAT HMI. Besides symbol annotation and that you need special licenses (TF2000) - see section prerequisites - there is nothing special about this interface. What is your problem, do you have any error messages, things we should explain in our documentation?

 are method calling available?
are method calling available?
Hi,
I was wondering if It is possible to call methods of a OPCUA server from the unity Side and how it can be done.
Thanks in advances

IMPORT STEP (STP) FILE TO REALVIRTUAL WITHOUT CADLINK
Dear friends,
Is there any solutions that I could import my own step file without using Cad Link (Pro)
I am now using Starter RealVirtual.
My budget is limmted.
VIETNAM-ALREADY CONNECTED PLC S71200 BUT CANNOT EXCHANGE DATA BETWEEN PLC AND UNITY
Dear friends.
I already connected PLC S7-1200 and Unity sucessfully.
However, There is no data signal exchanged between PLC (Tia Portal) and Unity.
Please help to find out and solve this problem.
Your prompt support will be highly appreciated.
My test: Turn on the light from Unity via Plc S7-1200.
Hi,
please check if everything is configured well, specially:
- Prevent collissions with real inputs
- Configure the PLC like described here: https://doc.realvirtual.io/components-and-scripts/interfaces/s7-tcp#configuring-the-plc
Best regards
Thomas
Can UPCUA4Unity achieve PLC data synchronization well?
Dear author, I want to buy your upcua4Unity, but I want to ask you a question. I need to collect data into Unity3d via KepServerEX's UPCUA protocol. I see OPCUAInterface and OPCUA_Node in the API. When the number of OPCUA_Nodes I need increases to 100+ or even 1000+, I can easily iterate the addresses corresponding to the PLC with low latency. Digital increment? Can you give me some better advice?
Logic Steps - Scripts
Hello! I'm following the RealVirtual tutorials playlist and I'm on part 7, where Logic Steps scripts are added, but I can't find them in my version of the Asset.
When I search, I only find the Control Logic Script.
I'm using the demo version, are these scripts only available in the Professional version?

game4automationparts4cad unzipping issue
i am facing difficulty in using cadenas parts4cad option as it is unzipping and importing assets taking too much time but no progress at all. KIndly let me know the possible issues. Also, let me know if I can access KUKA kr50 R2500 robot cad model through this asset or not.

 [Reccomanded] RealVirtaul 2022 HMI Source Omission
[Reccomanded] RealVirtaul 2022 HMI Source Omission
Hi, I am using realvirtual very well.
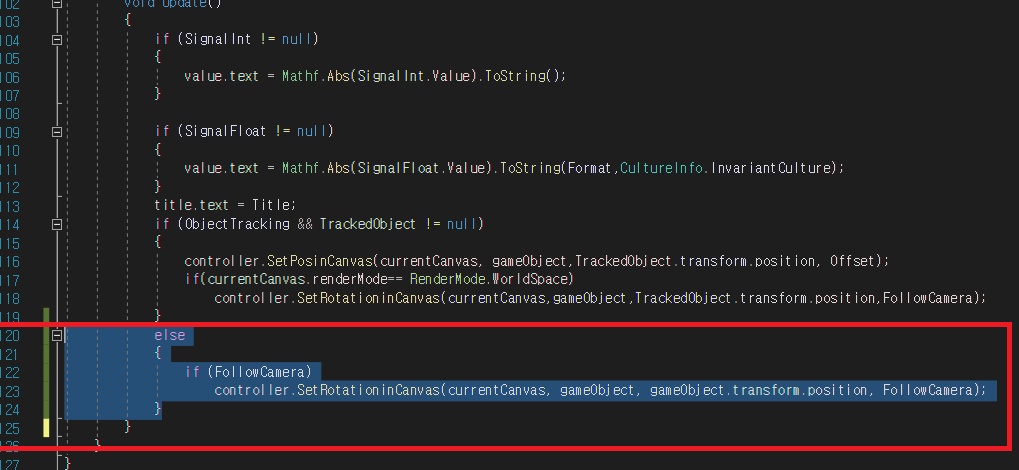
I find that there some Differences in HMI_Value.cs , HMI_Text.cs
One Function of 'Follow Camera' in HMI_Text.cs works very well.
because of 'else' in controller function
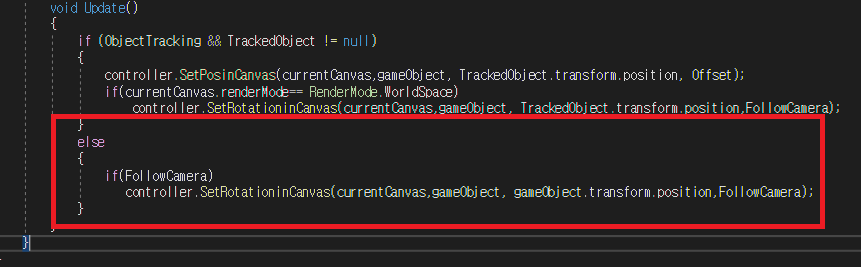
But The other Function of 'Follow Camera' in HMI_Value.cs omit the function of Tracking(else sources).
So, I reccomand you put into same function in HMI_Value.cs like below.
thks.
AR Support for Apple
Is the AR experience compatible with the Apple Vision Pro as advertised on the website, or is support still pending as stated in the documentation?
Transport surface make the conveyor texture mismatch
I don't know how to use transport surface, I notice in the demo scene the conveyor belt works perfectly, but in my scene everytime I tried turn the whole conveyor 90 degree but the texture dose not follow and still goes as before. How do I fix this?Video
It is an old version of realvirtual (still game4automation) we fixed a lot. You should upgrade to the latest release.
Senden Sie uns Ihr Feedback
Wir hören zu und setzen Ihre Ideen um.