Teilen Sie Ihre Erfahrunge und Wünsche mit uns und anderen Usern!
Teilen Sie Ihre Erfahrunge und Wünsche mit uns und anderen Usern!

 When Could I connect to Mitsubishi PLC with Game4automation Professional
When Could I connect to Mitsubishi PLC with Game4automation Professional
Hello,Dear Thomas,I'm coming back!
In China,There are two PLC usualy used for students in school.They are:Siemens and Mitsubishi.Now I have knowed how to connect Siemens,but I don't know how to connect Mitsubishi.
OPCUA is complicated,Can I connect Mitsubishi PLC directally like S7interface?Then can I connect to virtual Mitsubishi PLC like PLCSIM Advancedinterface without physical PLC?
I'm looking forward your replay。

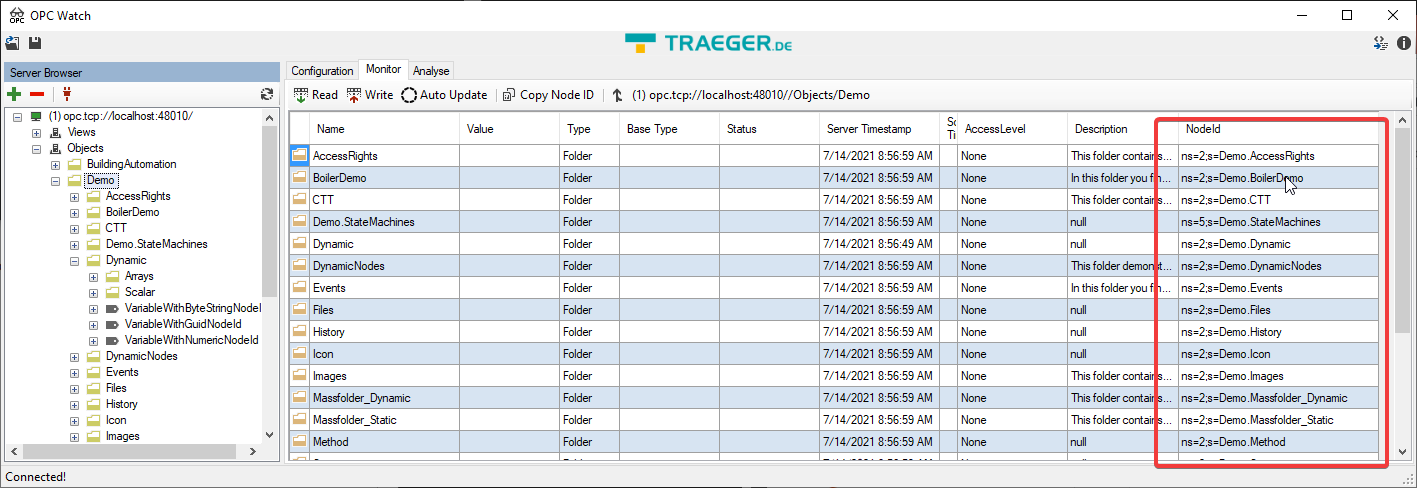
Hi, I don't know how you get the Top-Node ID on your OPCUA servers. With OPCWatch you can check and see it here:
If you leave Top-Node empty it should import all nodes and you will see it in Unity but this might take some time if there are a lot of elements in your OPCUA server.

PLCSIM interface
It is normal that the connection between PLCSIM interface and PLCSIM advanced is hard to connect?
The first connection work each time when I click play in Unity. However the next connection is realy random and most of the time it is not easy to connect. I have to restrat Unity or the PC.
Yes, Just checked the PLCSIM Advanced interface intensively yesterday and I was not able to see any connection problems. If you still have problems, please send us your PLCSIMAdvanced memory card content, the TIA Portal project and the full Unity project and I will check on my computer.
 S7 connection
S7 connection
Hello,
I have started to use S7 TCP-IP to connect to TIA Portal with PLCSIM advanced. When I think they are connected and I tried to force a signal at true, in the TIA program I see the corresponding signal blinking irregulary.
Do someone have this problem or how to resolve it?
It depends what you want to do. Because of Limitations in Unity PLCSim Advanced is a little bit more complicated (external coupling exe needs to be started). S7 Interface is easier and works on all Platforms. But with S7 interface you can't write to inputs where also a hardware is configured to.
I can't read the plc input signals
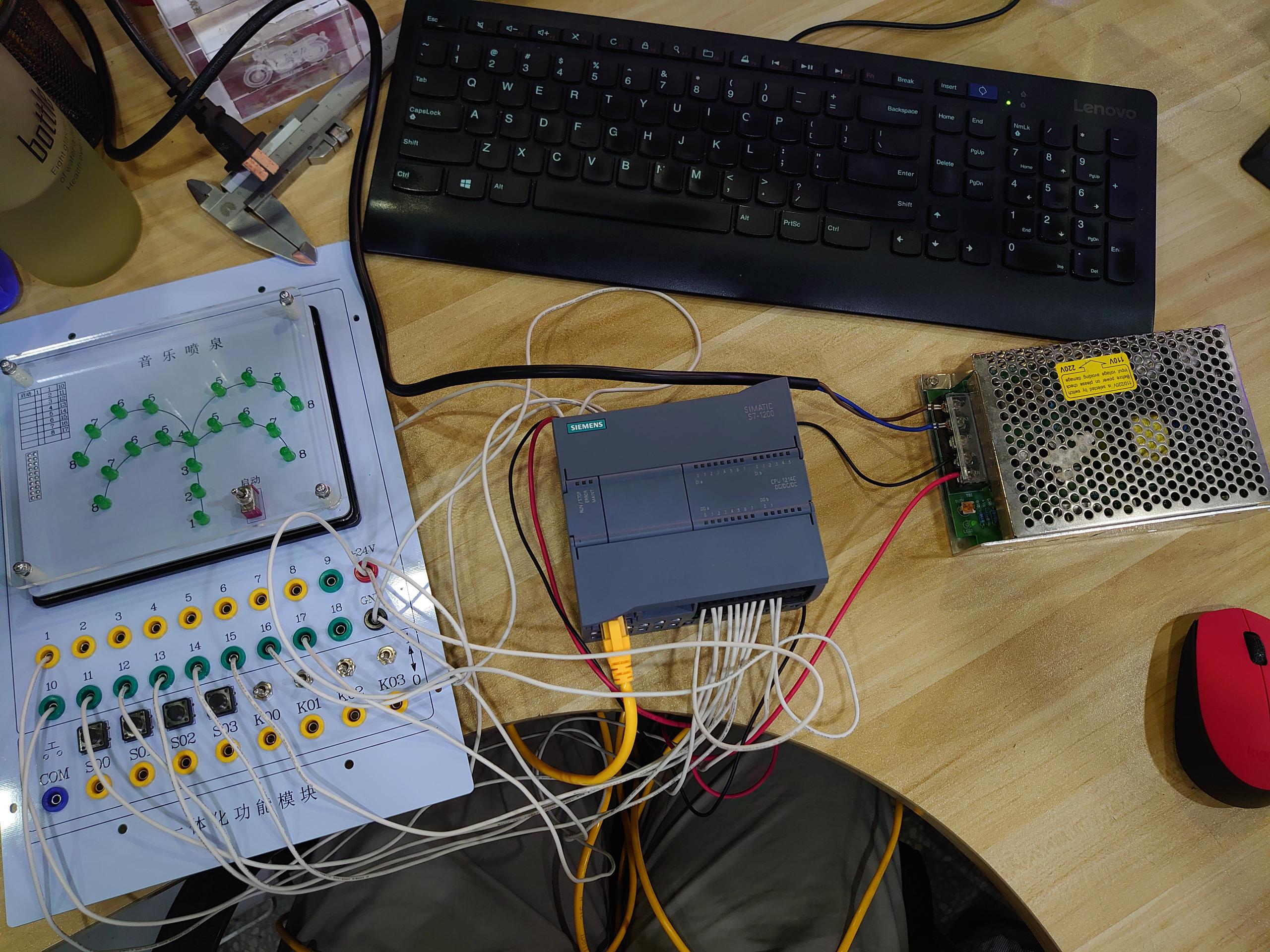
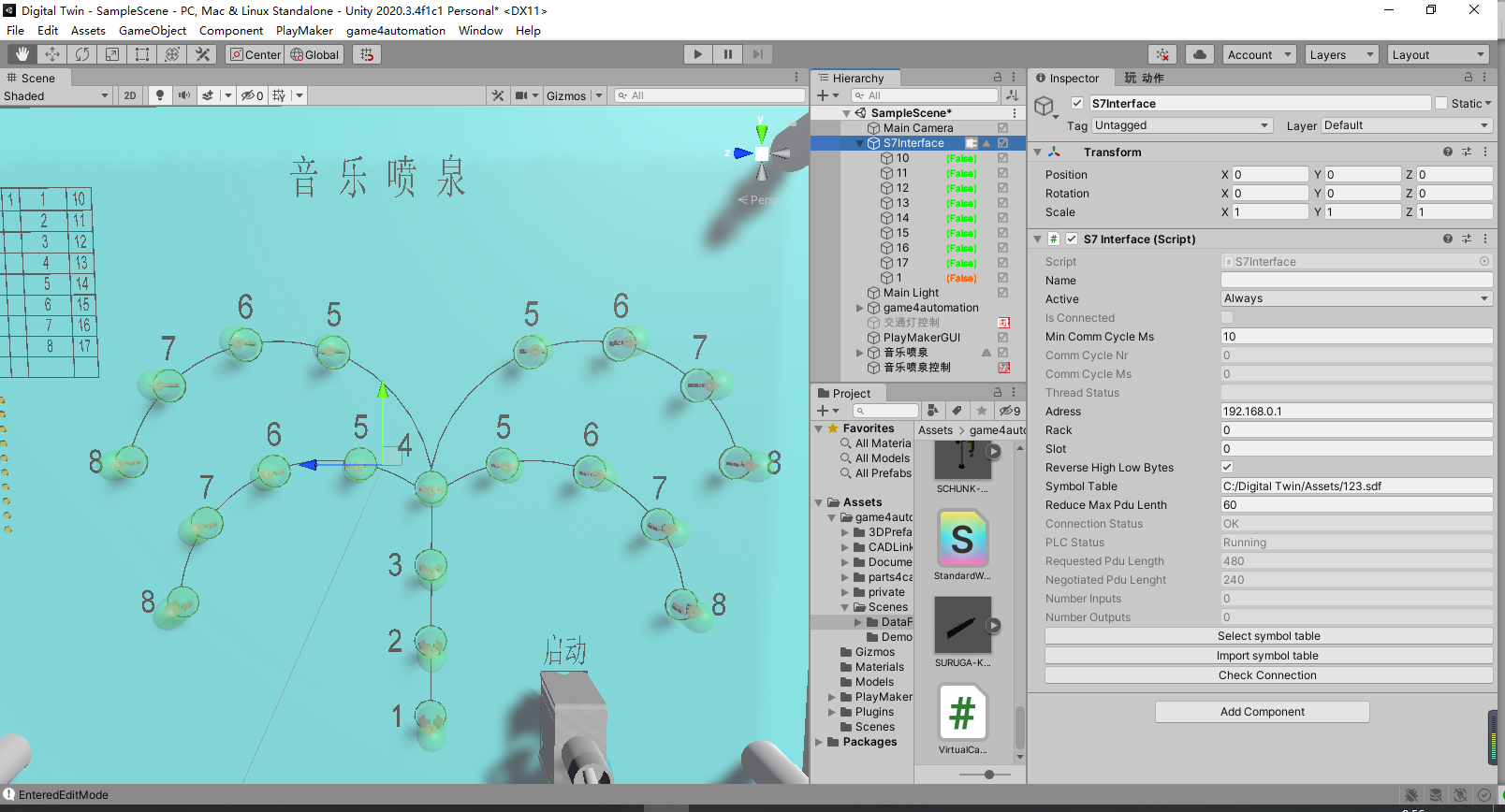
Dear Thomas.I connect S7-1200 PLC to unity,but when I import Outputs it is OK,when I import Inputs it doesn't work,I want to make a digital twin project.Can I just read the inputs and I can change the models depend the inputs status,I don't write it or change it.If my unity models want to know the inputs status,what should I do?
Hard to say where your problem is. But Input and Outputs are working if the inputs don't collide with a real hardware input. If you problem still exists please create a very simple example (S7 project and Unity project) and send it to us.
I can't find the component(Xde Rigid Body)
Hello!Dear Thomas!
When I Enable Interact,it shows:
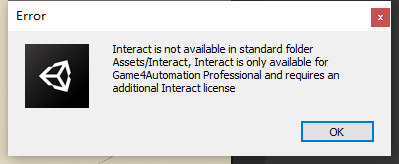
But I have buy it and I can't add component like the video(
Accurate Physics with Game4Automation
)My unity is 2020.3.4 and game4automation professional is running well.
Kinematic Error bei Verschiebung des Center-Punkts
Hallo,
ich versuche gerade einen Roboterarm mit der Kinematik des Starter Sets zu verbinden. Alle Komponenten bis auf eine Achse funktionieren:
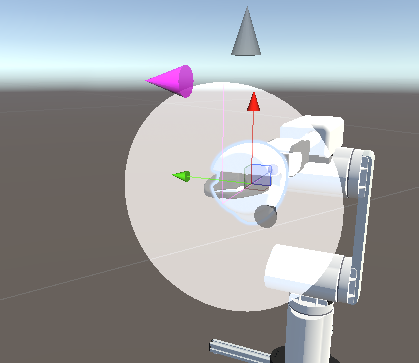
Ich will diese Komponente rotieren lassen, jedoch ist der Center-Point ein wenig versetzt. Wenn ich versuche es mit der Kinematics-Option "Move Center" anzupassen, erhalte ich folgende Fehlermeldung:
NullReferenceException: Object reference not set to an instance of an object
game4automation.Kinematic.Awake () (at Assets/game4automation/Kinematic.cs:149)
Ich habe auch versucht, wie es unter einem anderen Beitrag vorgeschlagen wurde, ein emptyObject an die passende Position zu setzen und es damit auszuprobieren. Hier verschiebt sich der Rotationspunkt jedoch noch weiter und lässt sich ebenfalls nicht mit der "Move Center" Funktion anpassen. Übersehe ich hier etwas oder wie kann ich das Problem lösen?
Grüße
Ich werde mir die MoveCenter Funktion heute nochmals genauer ansehen - in der Praxis verwenden wir sie selbst praktisch nie. Am Besten einfach ein leeres Gameobject an die richtige Stelle setzen und den Rest dann darunter (alles ohne MoveCenter)

Kinematic script
Hello ,
I´m tryng to integrate a robot Universal Robotic .
I´m follow this tutorial
My problem is the when i put one drive on second i can´t move the center to a new position with kinematic
Thanks
Please try to set empty game objects to the correct rotation positions and don't use move center in this case.
 Subscribe problem using multiple OPCUA Interfaces
Subscribe problem using multiple OPCUA Interfaces
Our physical machine is made up of multiple OPCUA servers.
In our Unity scene we have several OPCUA_Interface objects to connect to each server and a OPCUA Node connected to each interface.
If we use Read Value on the nodes we get the values we expect, however if we use the subscribe option we get the same value across all interfaces as if they are being overwritten somehow. We can get around it by using Read Value but it seems to come with a heavy performance cost.
Is this a bug or is there another way to set this up?
Many thanks
Hi Ted,
I am sending you a new DLL.
A new Beta (2020.02-beta-521) that is fixing this issue will be available soon on our download pages.
Best regards
Thomas
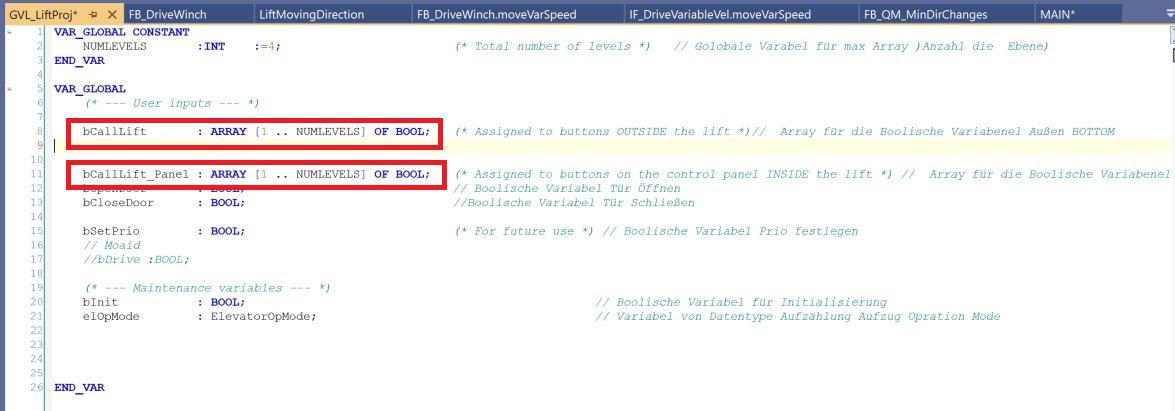
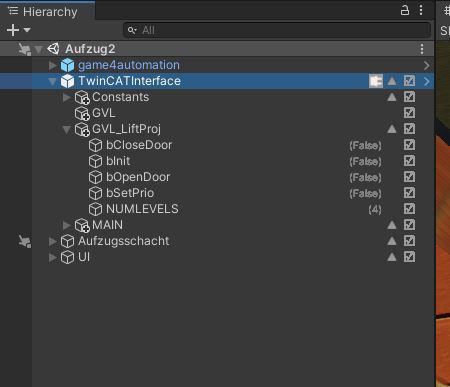
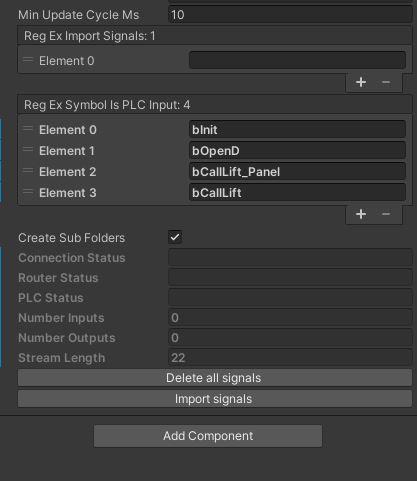
Import Signal TwinCATInterface Array
Sehr geehrte Damen und Herren,
ich möchte gerne Array Variabelen von TwinCAT impotieren (siehe Abbildungen), könnten Sie mir ein paar Tipps geben?
Mit freundlichen Grüßen
Othman
OPC UA cannot import nodes
Für ein Projekt versuche ich die Nodes vom C++ Test Server von Unified Automation zu importieren. Die Verbindung funktioniert und OPC Watch zeigt den Server mit allen Nodes korrekt an. Wenn ich aber "Import Nodes" in Unity drücke, dann kommt eine Exception:
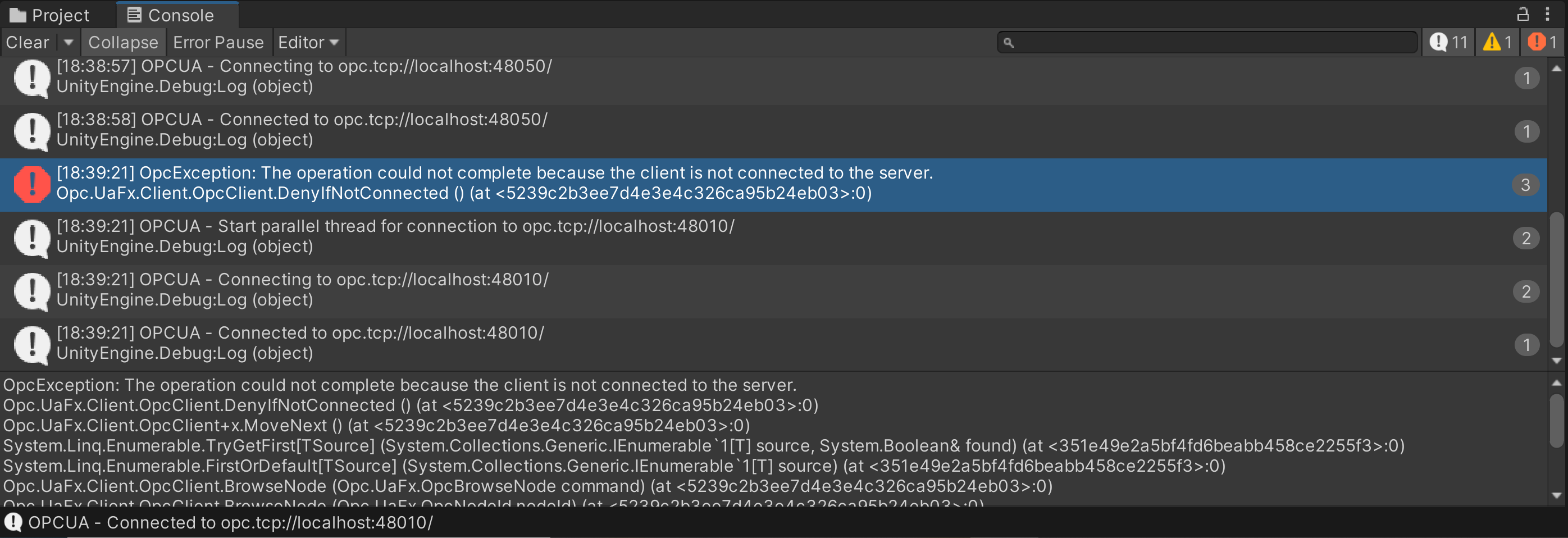
In den Einstellungen habe ich eigentlich nichts verändert:
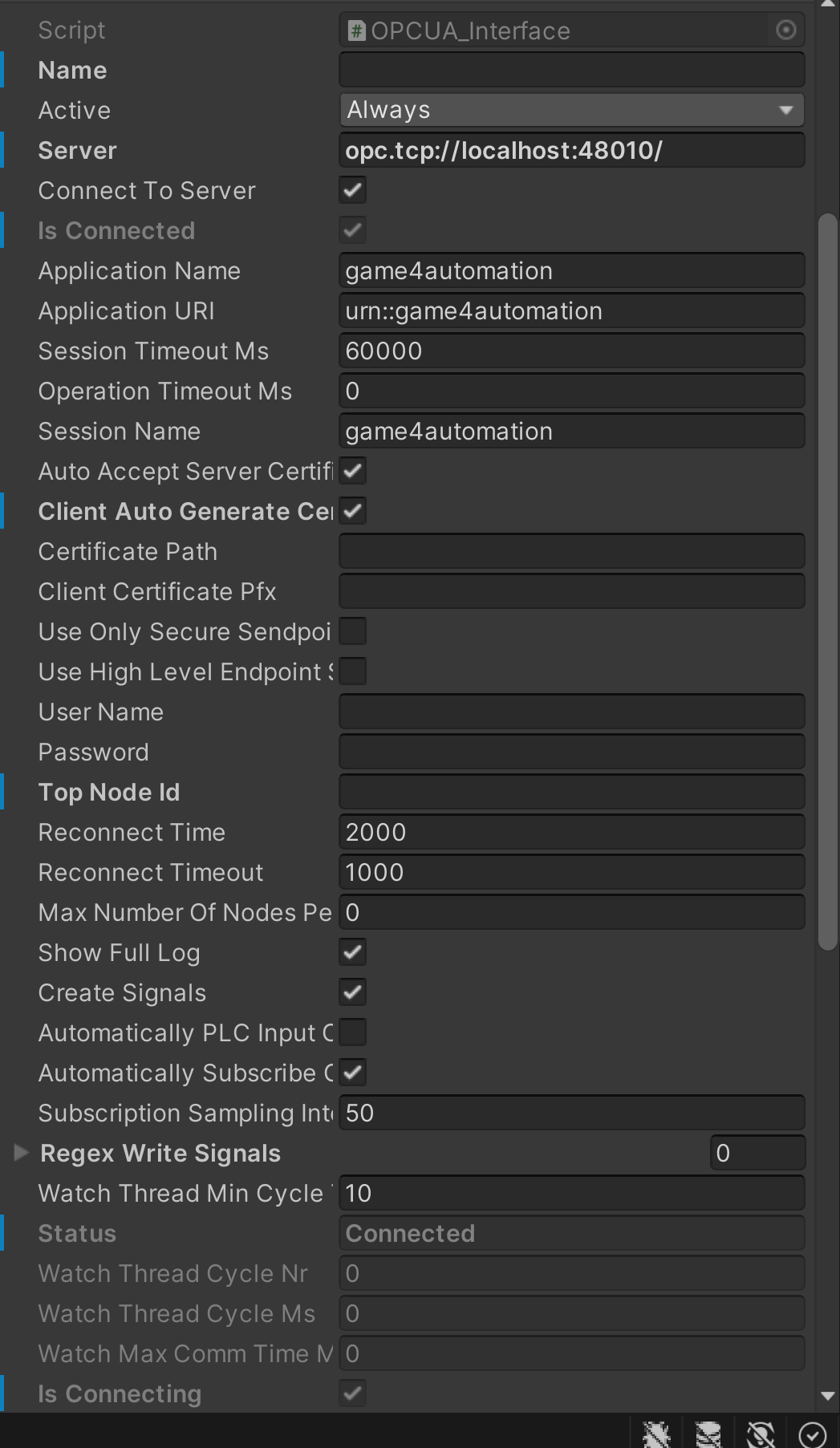
Ich bitte um Hilfe.
Es ist eine neue Beta im Downloadbereich (https://game4automation.com/download/customers/).
Dort ist das Importproblem behoben.
Senden Sie uns Ihr Feedback
Wir hören zu und setzen Ihre Ideen um.



How to set OPCUA
When Could I connect to Mitsubishi PLC with Game4automation Professional
Hello Thomas!How can I connect S7-200 to Unity
